

Electric automobile yaw stability control method based on self-adaptive reverse thrust controller
A technology for stability control and electric vehicles, applied in electric vehicles, control drives, control devices, etc., can solve problems such as difficulty in meeting, and achieve the effects of low cost, simple and easy method, and reduced output response
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0078] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
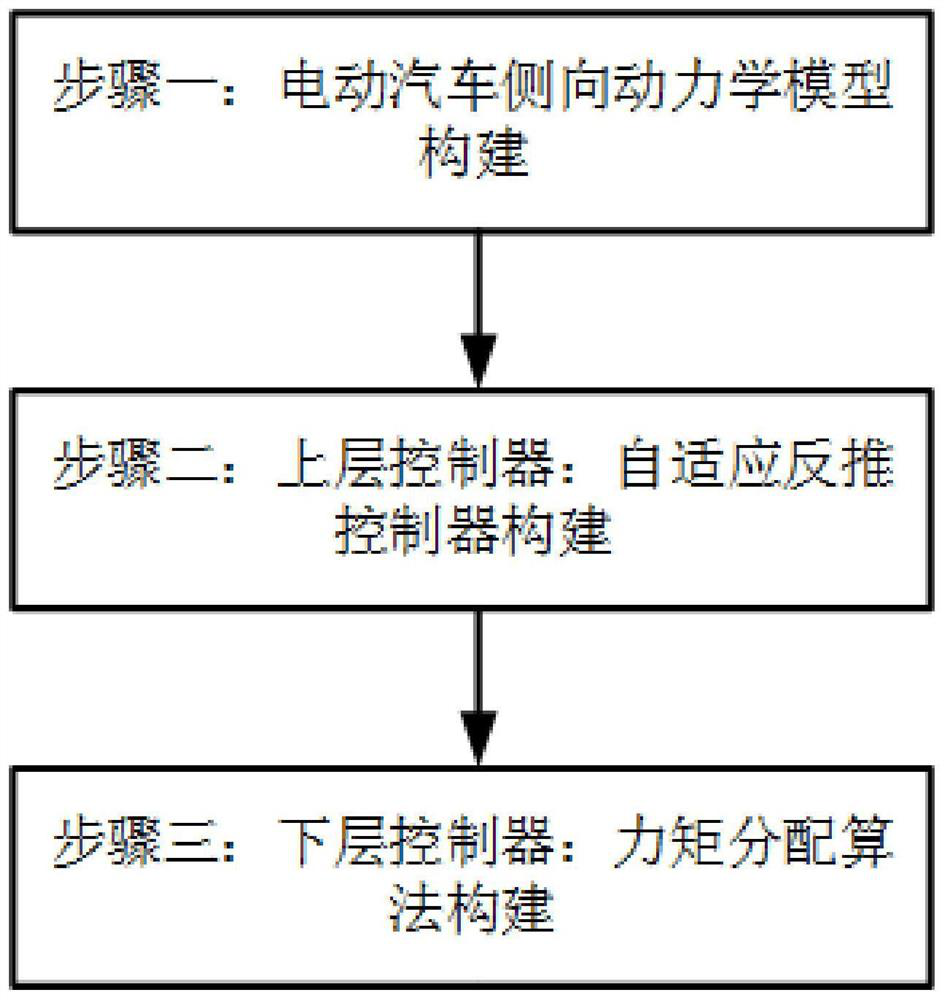
[0079] The present invention is based on the method for controlling the yaw stability of an electric vehicle based on an adaptive reverse thrust controller, such as figure 1 shown, including the following steps:
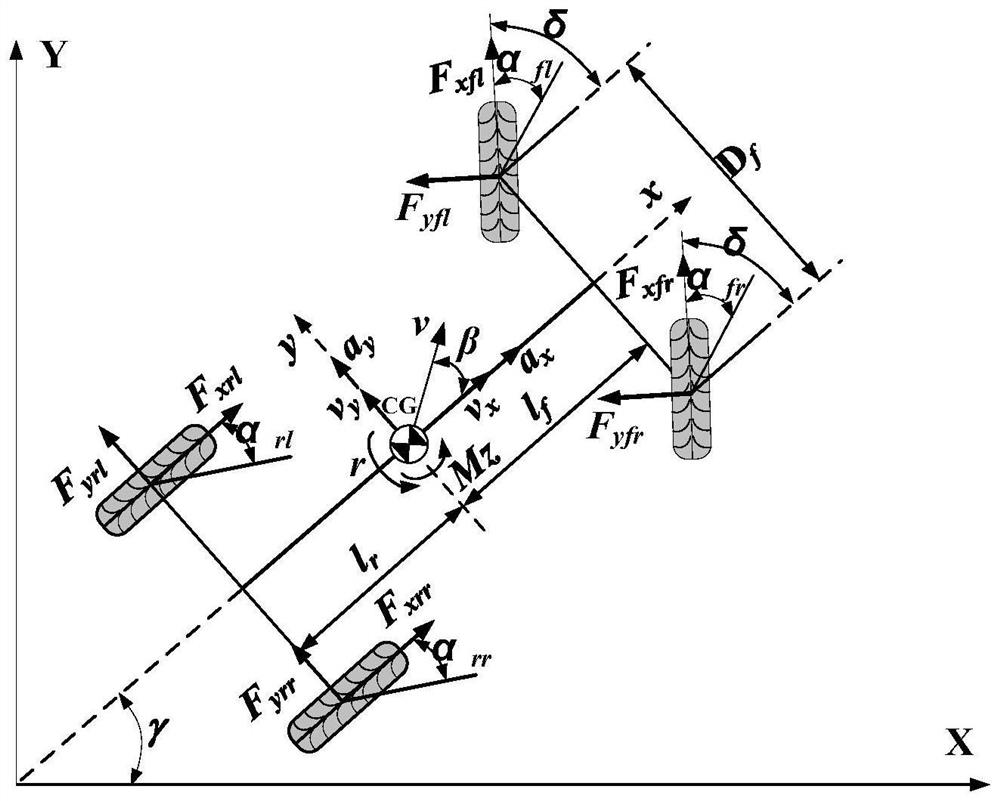
[0080] Step 1. Construct the lateral dynamics model of the electric vehicle; because it includes the main features of the lateral dynamics of the electric vehicle and has a simple structure, the lateral dynamics model of the electric vehicle has been widely used in the field of yaw stability control of the electric vehicle . The present invention proposes an electric vehicle lateral dynamics model, such as figure 2 shown. The electric vehicle lateral dynamics model includes the electric vehicle lateral dynamics equation, wheel rotation dynamics equation, lateral acceleration and lateral acceleration; the specific process is:
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More