

Full-automatic window wiping robot
A robot and fully automatic technology, applied in the direction of robot cleaning machines, window cleaning, cleaning equipment, etc., can solve the problems of dangerous efficiency, low machine adaptability, incomplete cleaning, etc., and achieve the effect of improving cleaning efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
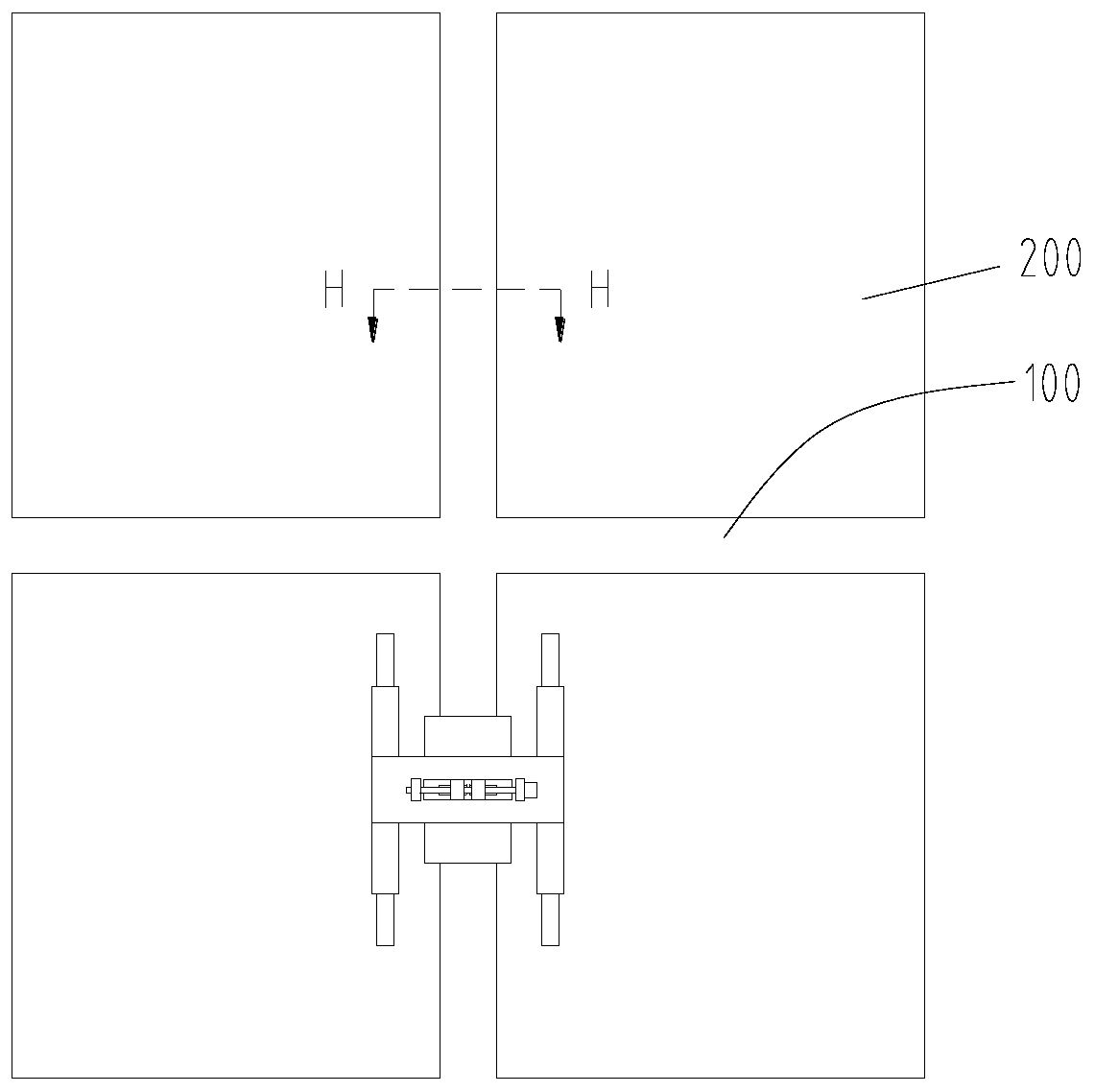
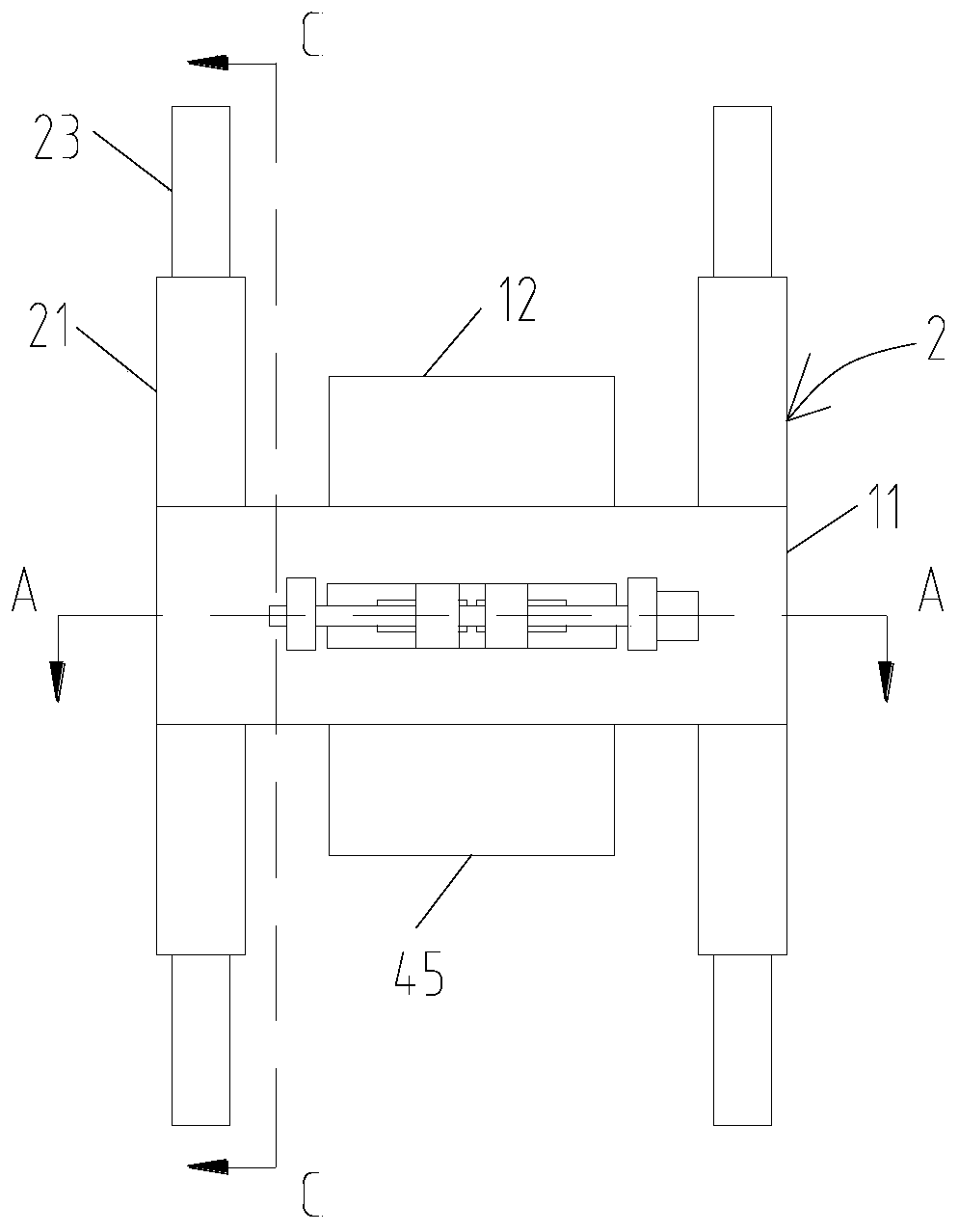
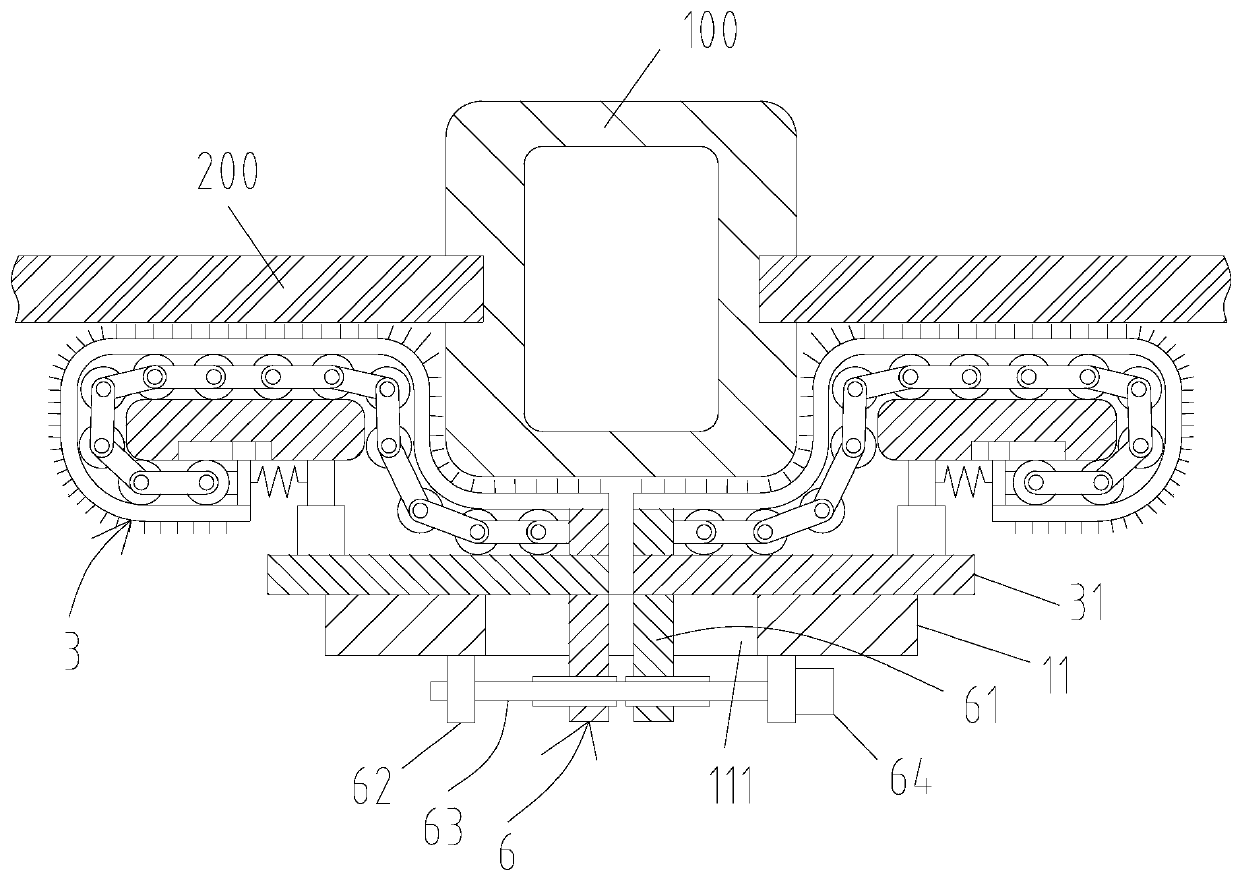
[0027] Such as Figure 1 to Figure 8 As shown, a fully automatic window cleaning robot according to the present invention includes a substrate 11, a controller 12 is fixedly installed on one side of the substrate 11, and the controller 12 is used to control the automatic operation of the robot; The two sides of the walking device 2 are provided with a running device 2, and the running device 2 includes a fixed box 21 fixedly installed on the four corners of the base plate 11, and an electric push rod 22 is fixedly installed in each fixed box 21, and the end of the electric push rod 22 One side of the slide plate 23 is fixedly installed on the head, and the first telescopic rod 24 is fixedly installed on the other side of the slide plate 23, and the end of the first telescopic rod 24 is fixedly installed with a suction cup 4, and the suction cup 4 is used to adsorb on the surface of the glass 200; Suction cup 4 comprises rubber cover 41, and described rubber cover 41 is provide...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More