

Ship sub-assembly automatic assembling device based on binocular vision and implementation method thereof
An automatic assembly device and binocular vision technology, applied in auxiliary devices, program-controlled manipulators, manipulators, etc., can solve problems such as increased labor costs, time-consuming and labor-intensive, and impact on workers' health, so as to facilitate integrated control and improve production. efficiency effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The specific embodiments of the present invention will be described in detail below with reference to the accompanying drawings, so that those skilled in the art can better understand how to practice the present invention. Although the present invention has been described in conjunction with its preferred specific embodiments, these embodiments are only illustrations, and do not limit the scope of the present invention.
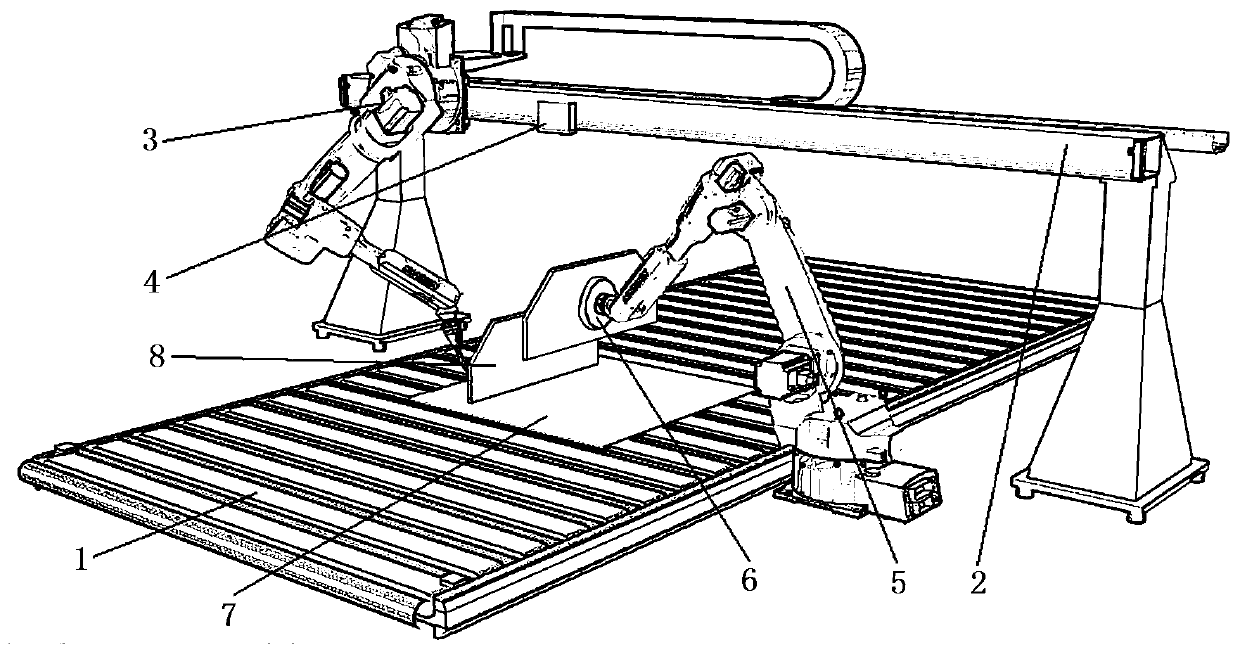
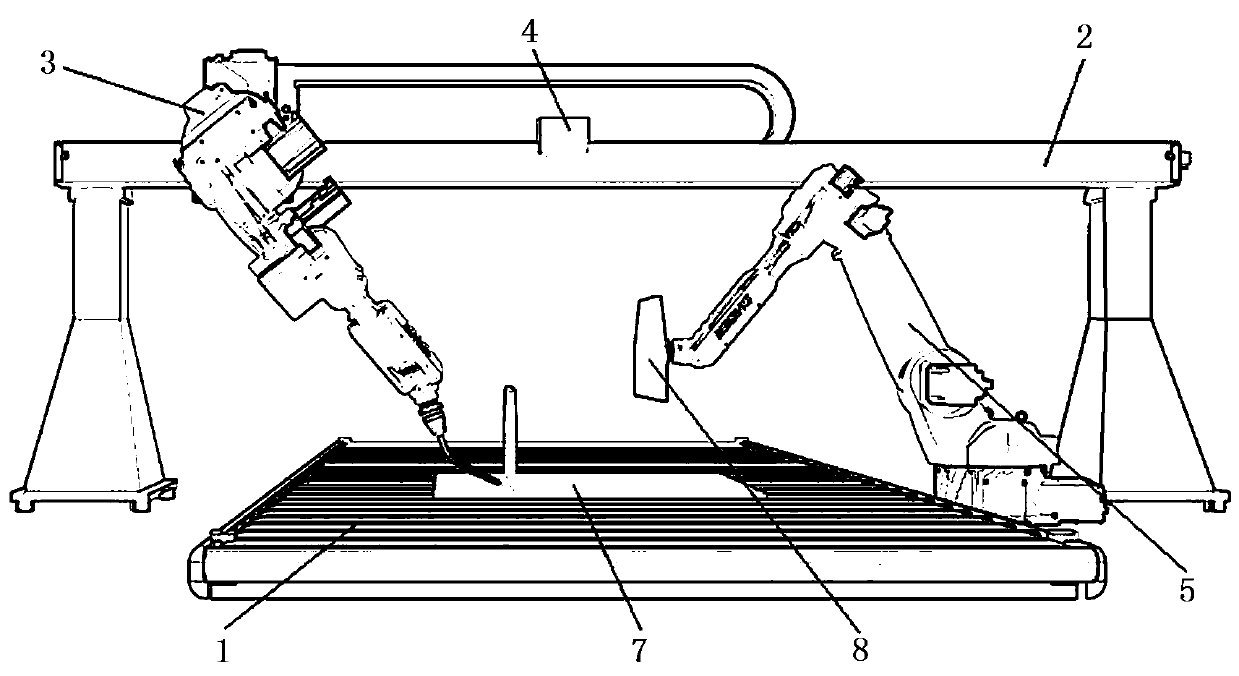
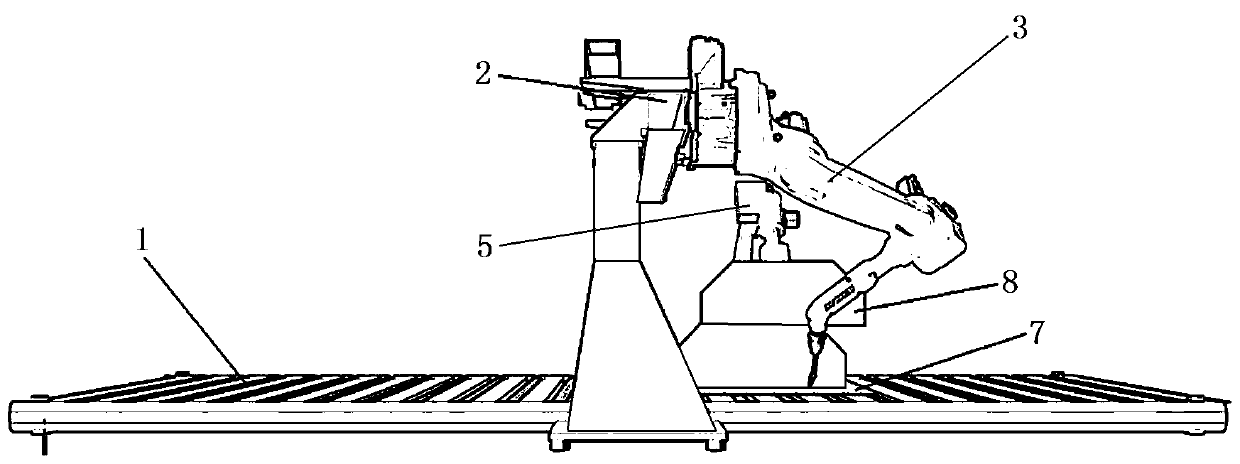
[0046] See Figure 1 to Figure 7 , An automatic assembly device for ship group erection based on binocular vision, including a conveyor platform 1, a robot assembly gantry, a binocular vision device, a robot grasping device, and a control system.
[0047] The conveying platform 1 is arranged horizontally. In this embodiment, the conveying platform 1 is a chain plate conveying platform 1.
[0048] The robot assembly gantry includes a 2-DOF movable gantry 2 and a 6-DOF spot welding robot 3.
[0049] The two-degree-of-freedom movable gantry 2 includes an X-axis ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More