

Electric power inspection unmanned aerial vehicle path planning method based on improved APF
A path planning, power inspection technology, applied in non-electric variable control, vehicle position/route/height control, instruments, etc., can solve the problem of easily falling into local minimum points, unreachable targets, unable to cross U-shaped obstacles, etc. problem, to achieve the effect of good inspection effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other. The present invention will be described in detail below with reference to the accompanying drawings and examples.
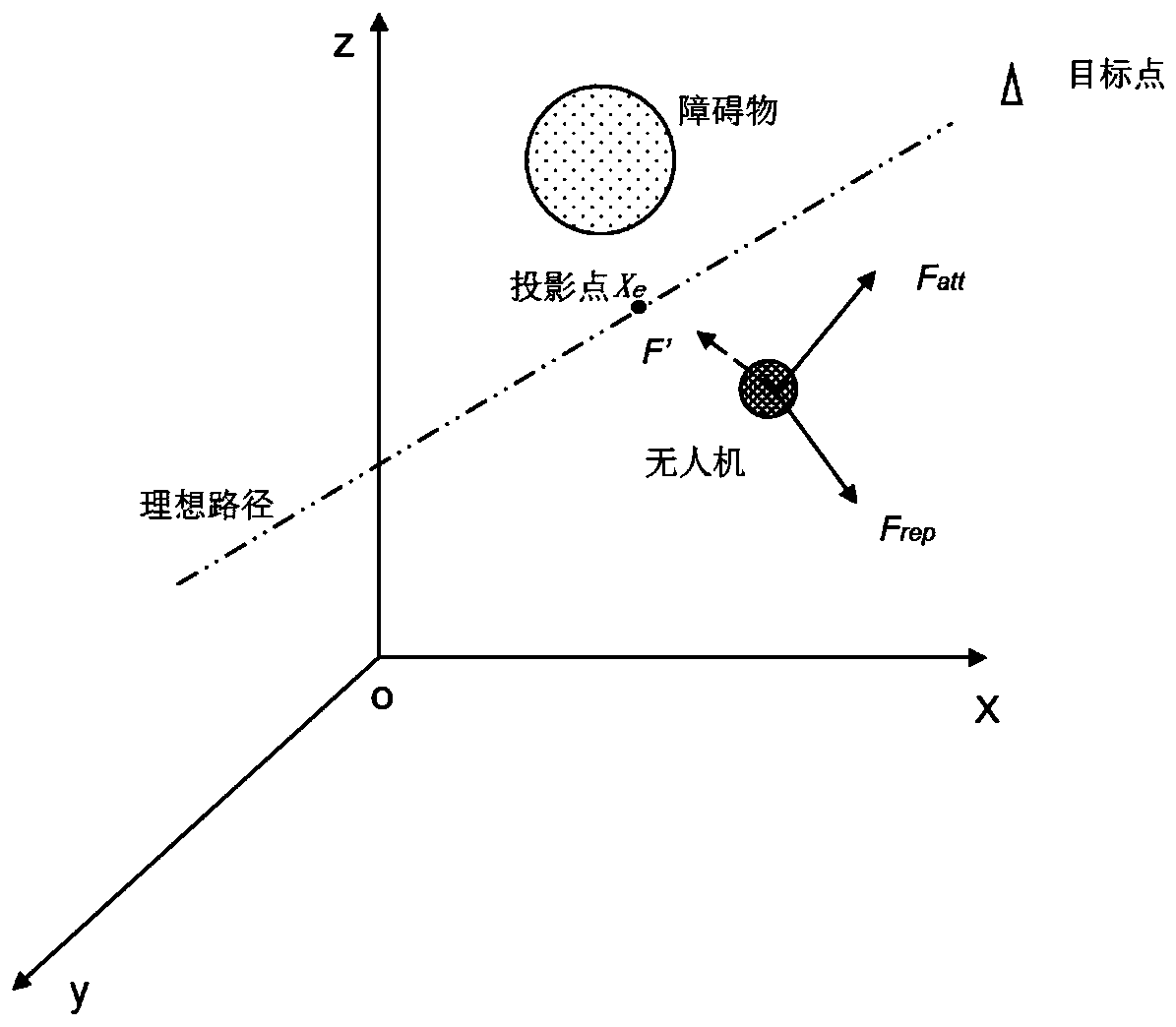
[0032] On the basis of the traditional potential field, the gravitational field U' of the projected point of the UAV on the ideal path is added, such as figure 1 Shown, F att is the attractive force generated by the gravitational field, F rep is the repulsive force produced by the repulsive field, F' is the attractive force produced by the gravitational field of the added projection point, and the improved potential field function is:
[0033] u total =U att + U rep +U'-------------(1)
[0034] U in the above formula total is the force field, U att is the gravitational field, U rep is the repulsive force field, U’ is the projection point X of the UAV on the ideal path e gravitational ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More