Control method of aseismic airbag of fixed-wing unmanned target aerial vehicle
A technology of shock-absorbing airbags and control methods, applied in pump control, aircraft parts, mechanical equipment, etc., can solve problems such as damage to target drones, inability to meet shock-absorbing needs, and achieve the effect of meeting shock-absorbing needs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] Below in conjunction with accompanying drawing, the implementation of the present invention will be further described:
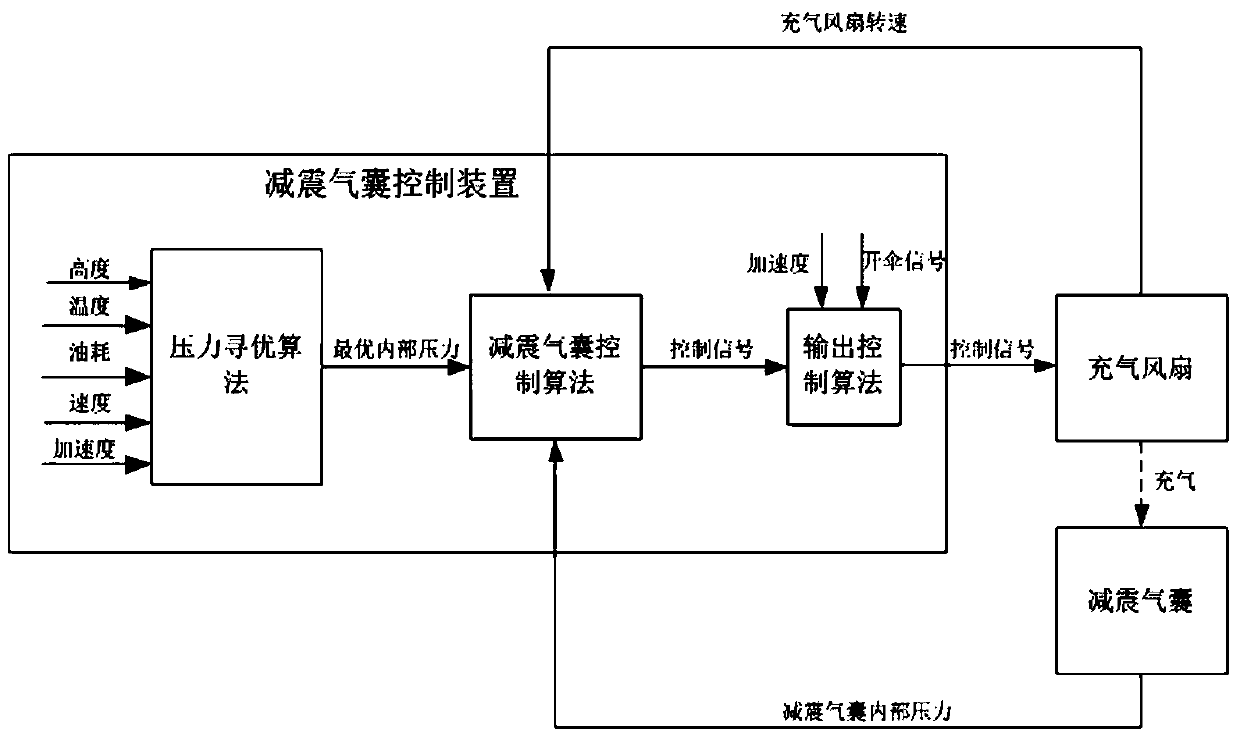
[0028] The invention relates to a method for controlling a shock-absorbing airbag of a fixed-wing unmanned target drone. Specifically, it includes the following steps:
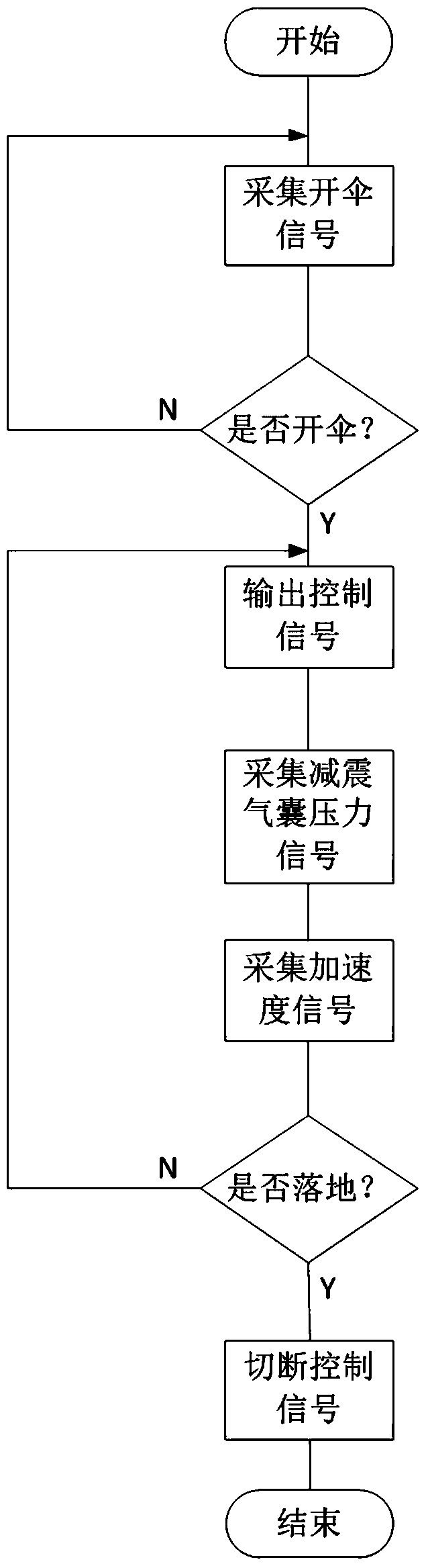
[0029] 1) After the fixed-wing unmanned target drone receives the landing signal, the unmanned target drone collects the parameter information at this time;
[0030] 2) Process the collected information and calculate the optimal internal pressure value of the shock-absorbing airbag;
[0031] 3) Collect the actual pressure inside the shock-absorbing airbag, and operate the inflatable fan to make the shock-absorbing airbag reach the optimal internal pressure;
[0032] 4) When the fixed-wing unmanned target drone lands, stop the fan.
[0033] The parameter information includes the height, temperature, fuel consumption, speed and acceleration of the fixed-wing unmanned target drone.
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



