

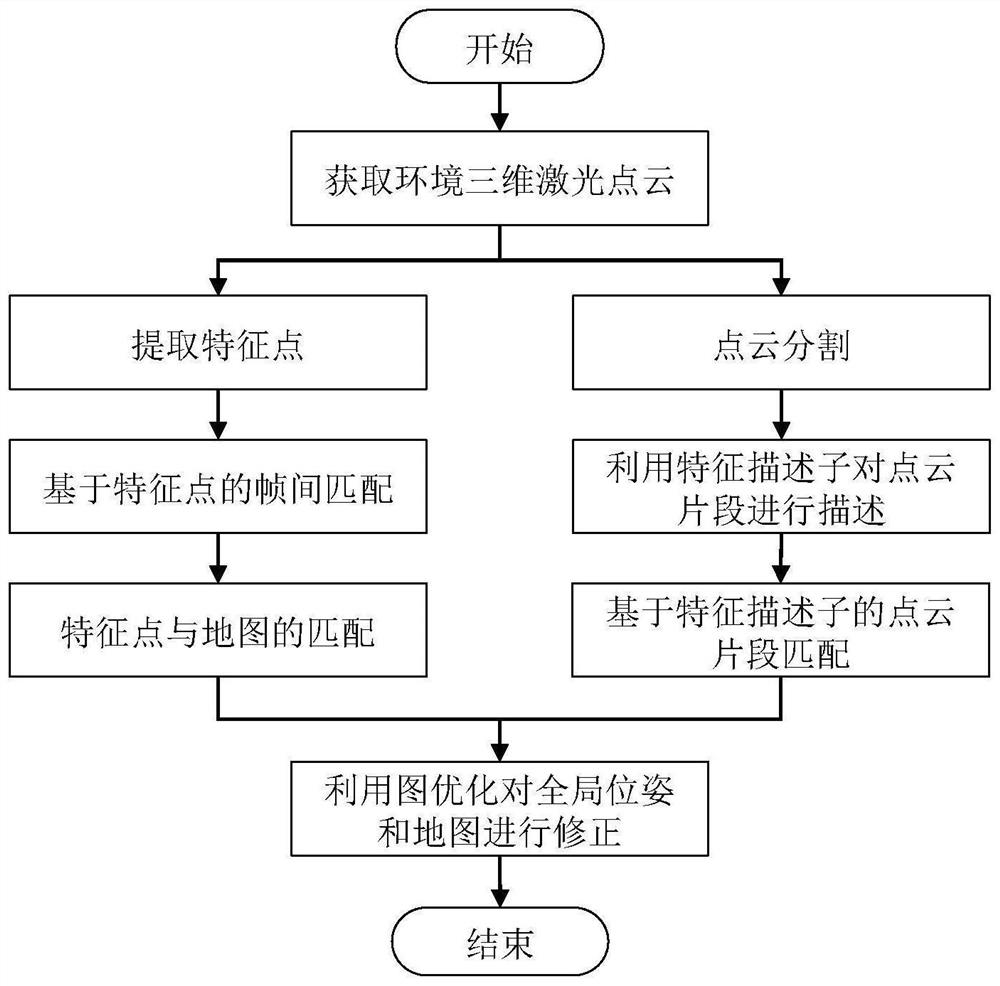
A Synchronous Positioning and Composition Method Based on Point Cloud Segmentation Matching Closed-loop Correction
A synchronous positioning and closed-loop correction technology, applied in image analysis, image enhancement, image data processing, etc., can solve the problems of lack of loop closure detection storage and correction, error accumulation, etc., to achieve good global consistency, eliminate accumulated errors, high efficiency stored effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
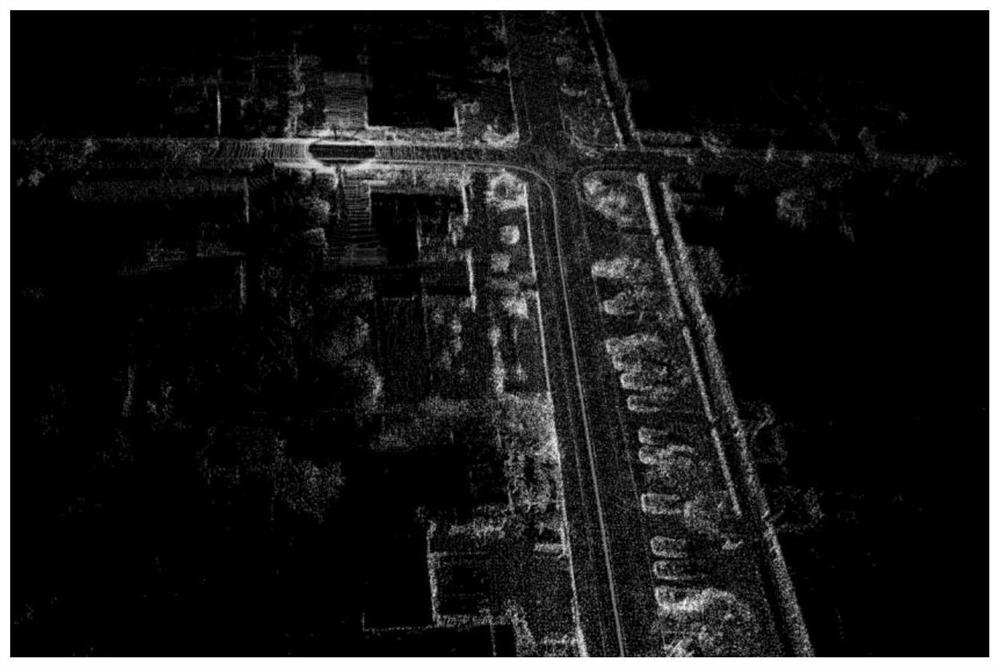
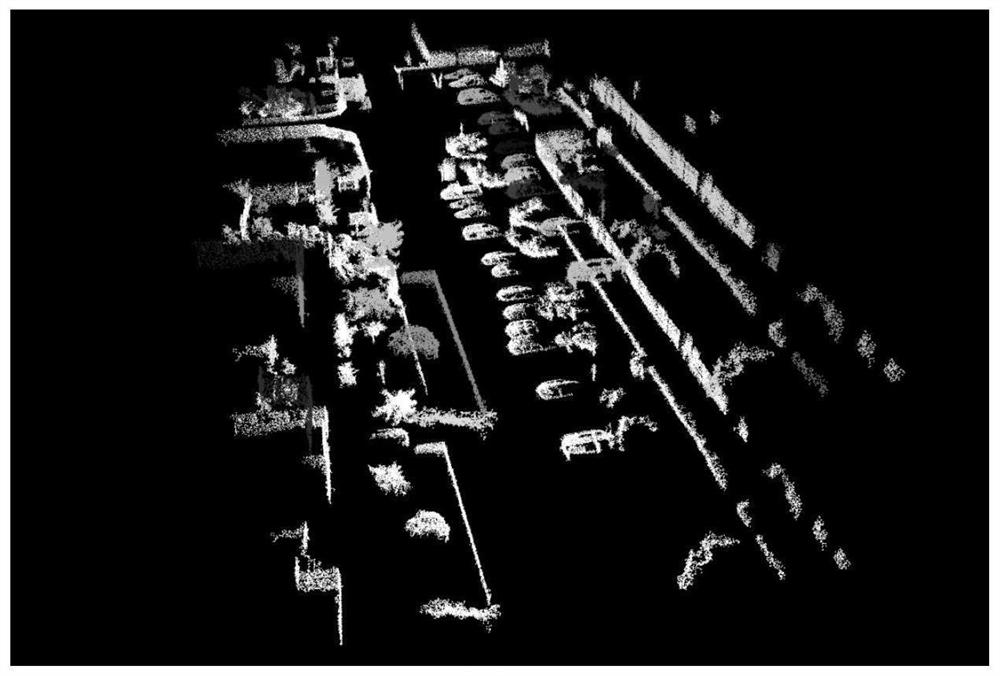
[0042] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0043] This implementation example provides a method for synchronous positioning and composition based on point cloud segmentation matching closed-loop correction. The embodiment of the present invention uses the Velodyne HDL-16E three-dimensional laser radar and the KITTI outdoor long-distance urban street data set for algorithm verification. In addition, the mobile robot is also equipped with sensors such as an odometer encoder, an inertial measurement unit IMU, and an industrial computer equipped with a ROS system to realize communication between each sensor and the robot. The horizontal scanning range of the 3D lidar is 360 degrees, the pitching scanning range is 30 degrees, and the scanning distance is 100 meters; the core processor of the industrial computer is i5-4460, four threads, 3.20GHz, and 4G running memory. The example algorithm is tested...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More