

Four-degree-of-freedom parallel robot mechanism
A degree of freedom and robot technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems that are prone to vibration and not conducive to improving the dynamic response characteristics of the mechanism, so as to reduce the difficulty of assembly, improve the stiffness and dynamic response characteristics, The effect of simple and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
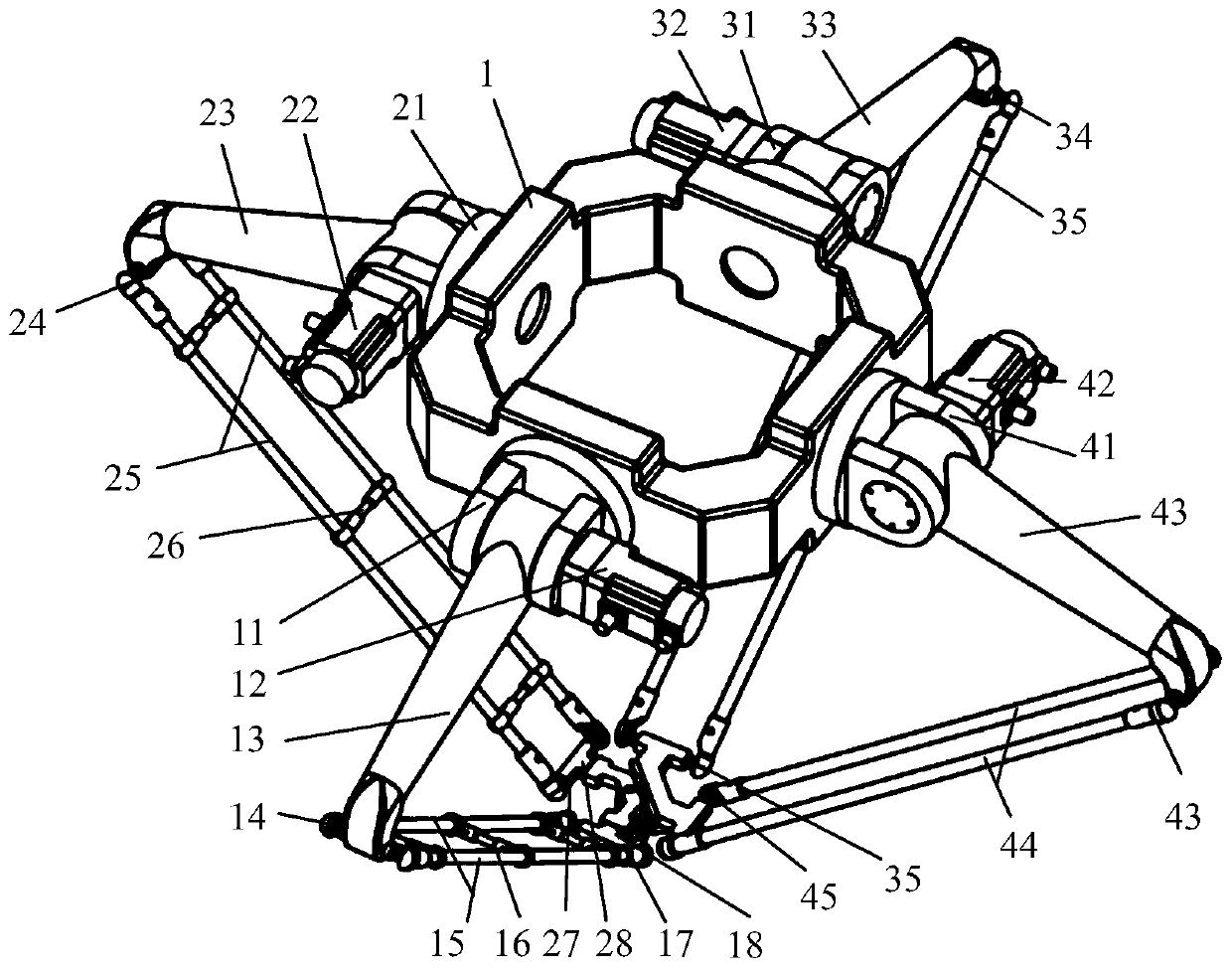
[0023] In conjunction with the accompanying drawings, a four-degree-of-freedom high-speed parallel robot mechanism of the present invention includes a fixed frame 1, a moving platform, and a first branch chain, a second branch chain, and a third branch chain arranged between the fixed frame 1 and the moving platform. and the fourth branch;
[0024] The first branch and the second branch have the same structure, and the third branch and the fourth branch have the same structure;
[0025] The first branch chain includes a first rotating fork 11, a first driving device 12, a first near frame rod 13, two parallel and equal long first far frame rods 15, and a first rotating shaft 18; A rotating fork 11 is rotationally connected with the fixed frame 1, the first driving device 12 is fixedly connected with the first rotating fork 11, and one end of the first near frame rod 13 is rotationally connected with the first rotating fork 11, and is connected with the first rotating fork 11. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More