

Efficient grabbing method for complicated-shaped object
A technology for complex shapes and objects, which is applied in the field of efficient grasping of complex shaped objects, can solve the problems of variable size and difficulty in convenient grasping of objects, so as to improve firmness and reliability, improve grasping efficiency, and control principles simple effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
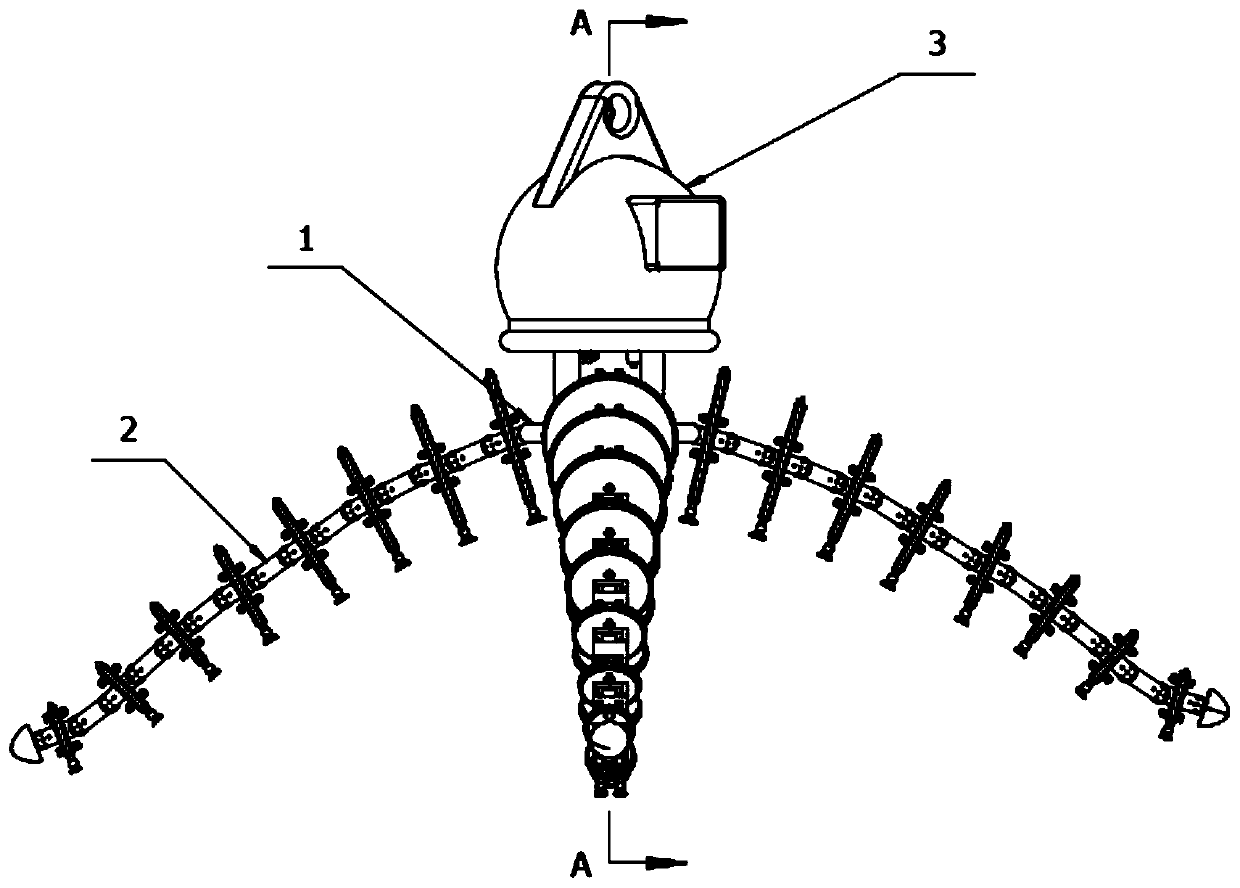
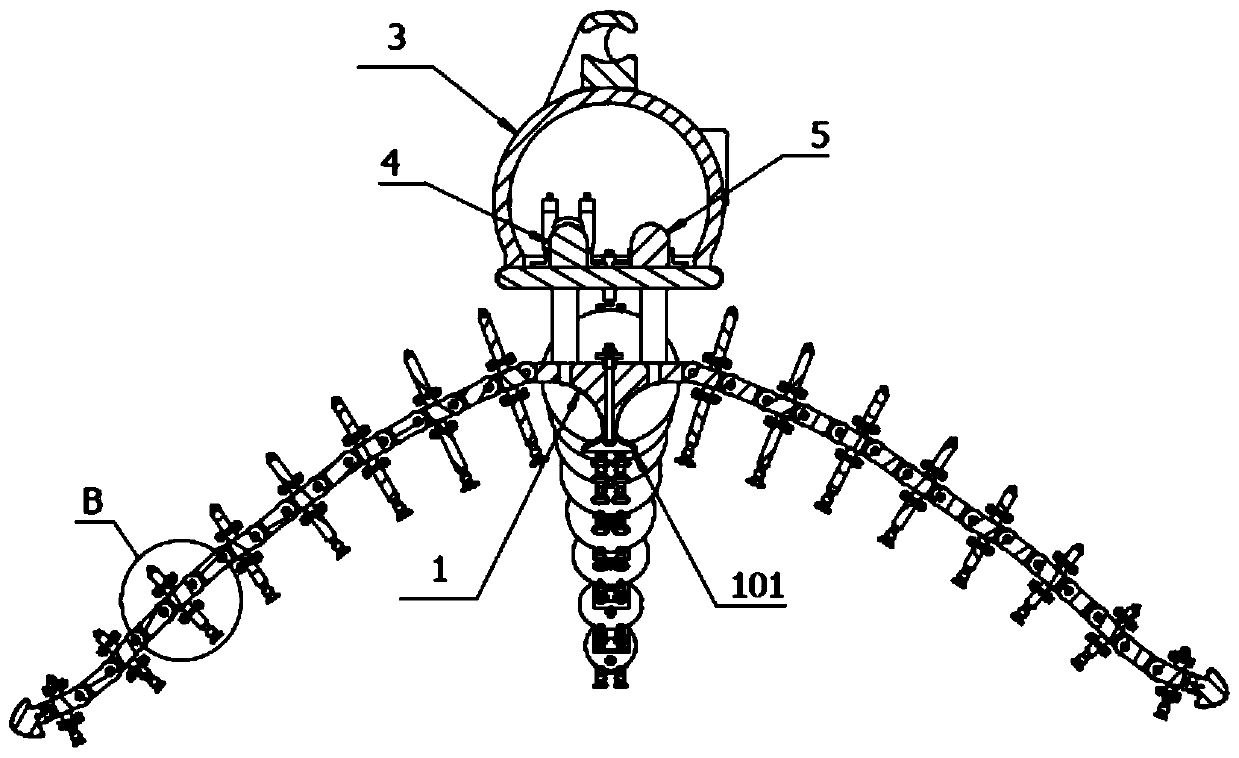
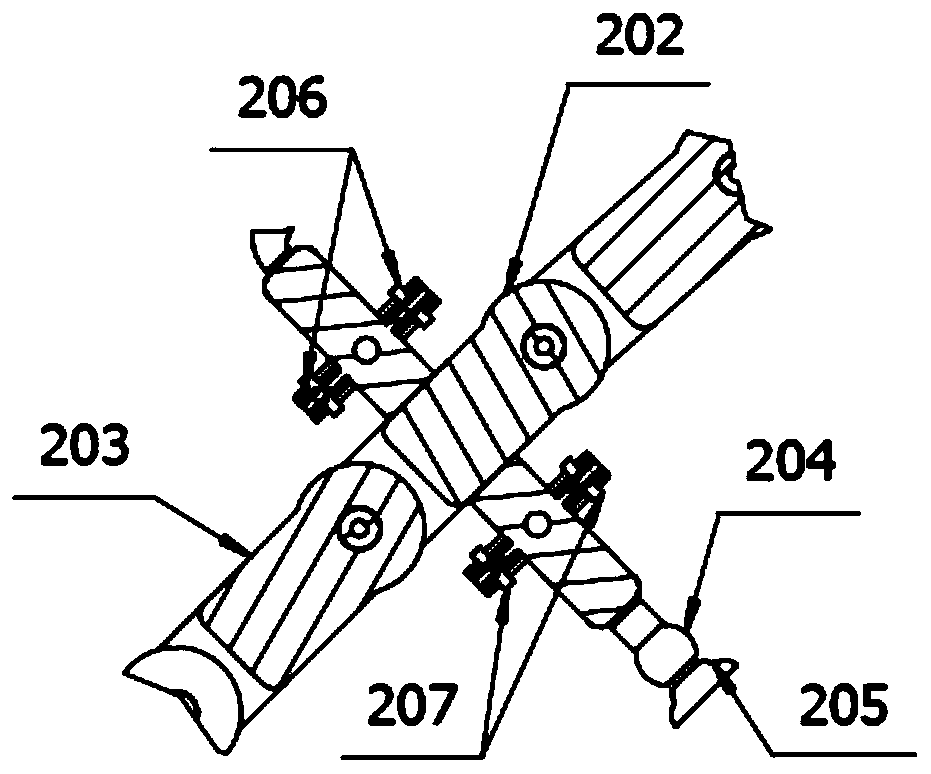
[0026] refer to figure 1 , figure 2 , image 3 , Figure 4 and Figure 5 , the present invention is a high-efficiency grasping method for objects with complex shapes. The grasping method utilizes the air-controlled mechanical claws of the bionic octopus tentacles to grasp objects. The mechanical claws include a mechanical arm support 1, a plurality of mechanical arms 2 and a control chamber 3 , the front end of each of the mechanical arms 2 is set on the mechanical arm support 1, the first air pump 4 and the second air pump 5 are arranged in the control compartment 3, and each of the mechanical arms 2 is provided with a plurality of Disc-shaped framework 201, the disc-shaped framework 201 is formed by injection molding, the middle part of the disc-shaped framework 201 is pierced and fixed with a first joint 202, and a second joint 203 is hinged between adjacent first joints 202. The upper and lower end faces of the frame 201 are respectively provided with through first ai...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More