

Autonomous obstacle avoidance method for two-wheeled self-balancing vehicle under multi-obstacle environment
A self-balancing vehicle and environmental technology, applied in the direction of adaptive control, general control system, two-dimensional position/channel control, etc., can solve the problem that the two-wheeled self-balancing vehicle cannot autonomously avoid obstacles, etc., and achieve control stability It has the effect of improving exercise efficiency and ensuring exercise safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be described in detail below with reference to the accompanying drawings and embodiments.
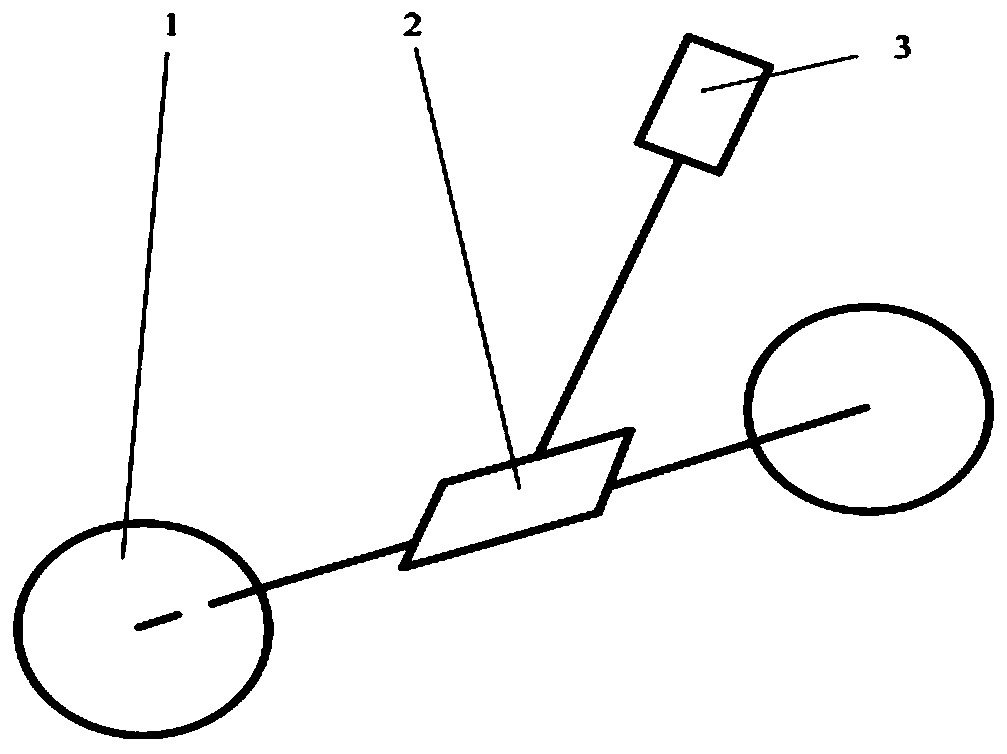
[0020] Such as figure 1 As shown, the two-wheel self-balancing vehicle involved in the present invention mainly includes wheel 1, chassis 2 and body 3, and its dynamic model can be expressed as
[0021]
[0022]
[0023]
[0024] among them, τ v =τ r +τ l , Τ ω =τ r -τ l , M v = I 2 / r 2 +m ω +m c / 2+m b / 2,J 1 = I 1 +I 3 / 2+I 5 / 2+(m ω +I 2 / r 2 )d 2 / 4,J 2 = I 4 / 2+I 6 / 2+m b L 2 / 2, x and y are the horizontal and vertical coordinates in the geodetic coordinate system, Is the steering angle, θ is the body inclination angle, m ω Is the wheel mass, m c Is the chassis mass, m b Is the body mass, r is the wheel radius, d is the track, L is the distance from the center of mass of the body to the axle, I 1 Is the moment of inertia of the wheel around its di...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More