Visual SLAM closed-loop detection method based on convolutional neural network and VLAD
A convolutional neural network and closed-loop detection technology, which is applied in the field of closed-loop detection based on convolutional neural network and VLAD, can solve problems such as lack of robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
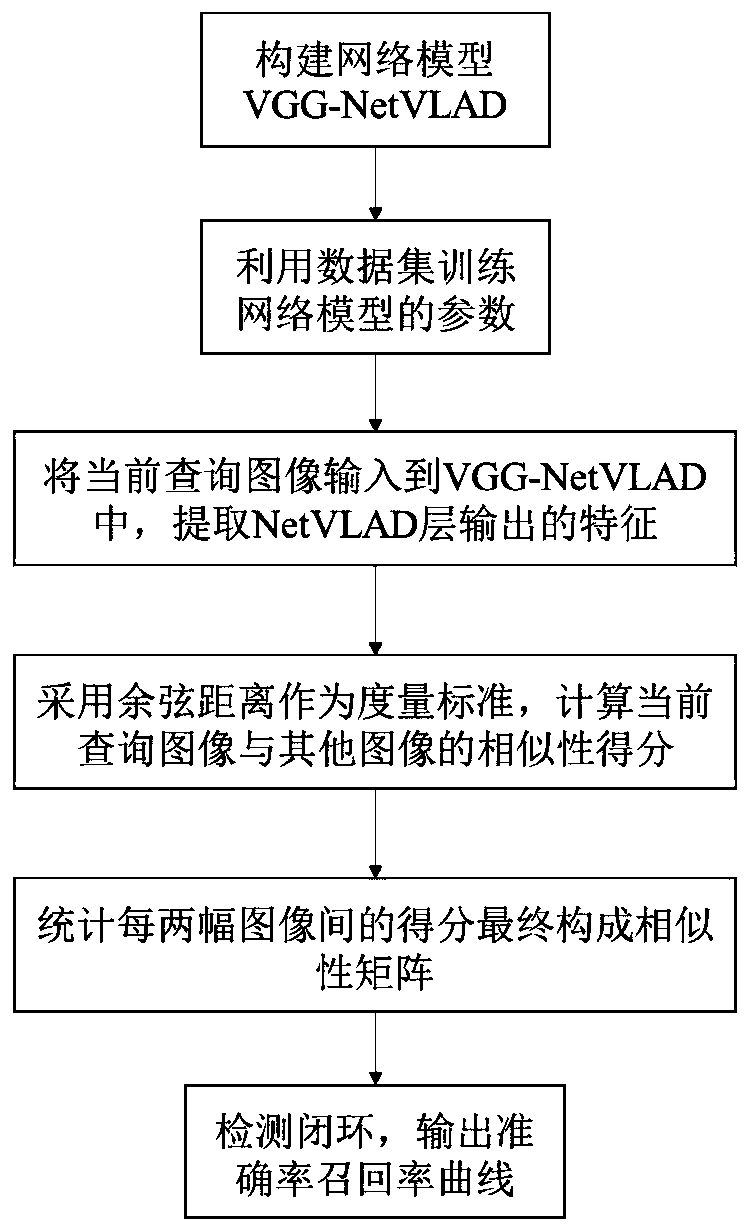
[0045] The specific implementation process is as figure 1 Shown:
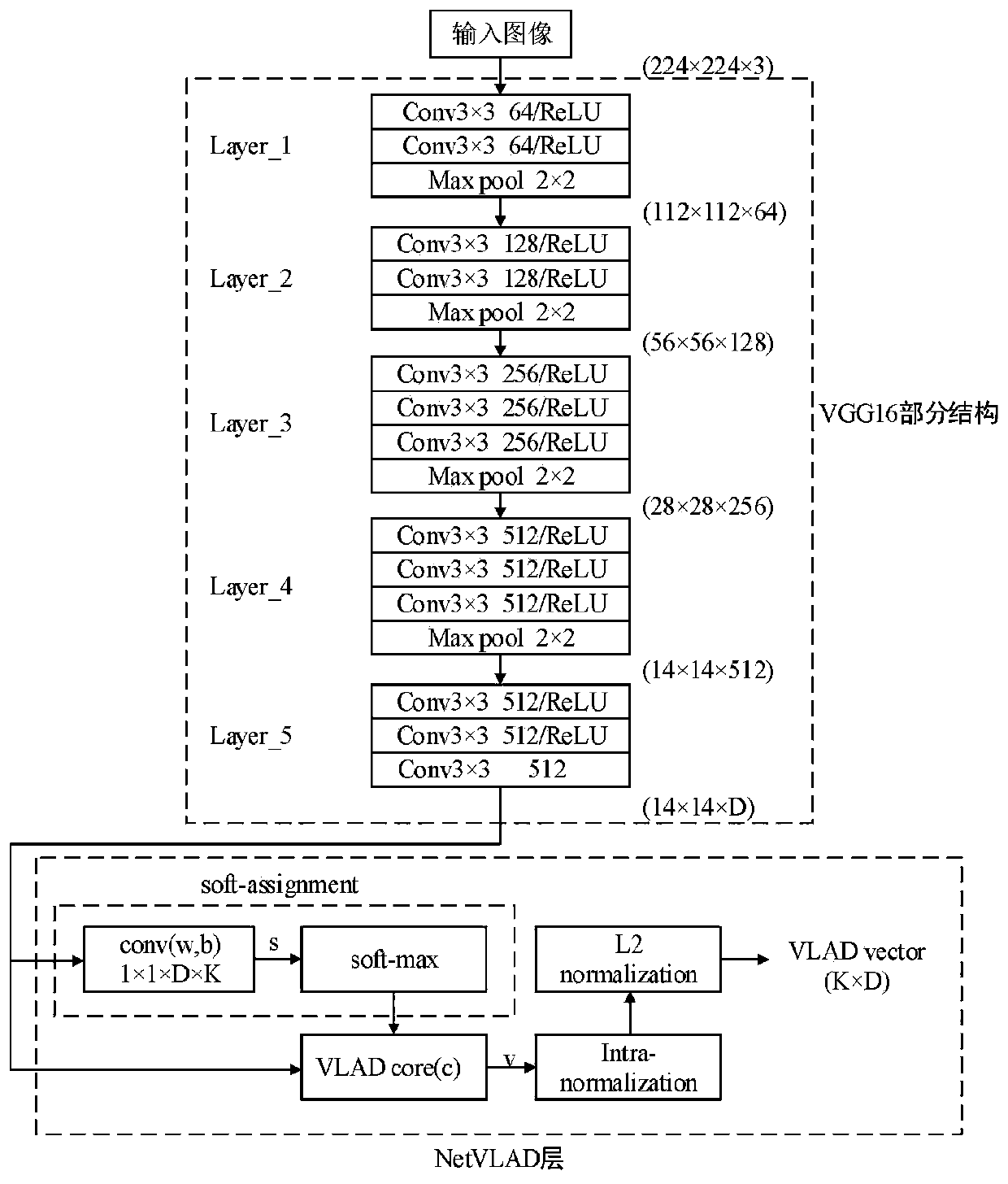
[0046] The first step is to construct a network model that integrates VGG16 and VLAD. figure 2 A schematic diagram of the constructed network model. The network is divided into two parts: the VGG16 partial structure and the NetVLAD pooling layer. The first part removes the pooling layer and the fully connected layer after the last convolutional layer conv5_3 of VGG16, including the RELU activation function. As the last layer of the network, NetVLAD can be decomposed into several basic CNN layers and connected to form a directed acyclic graph. The soft-assignment process can be divided into two steps: 1) The feature {x i} Through a convolution layer containing K 1×1 convolution kernels, the output is obtained: 2) then s k (x i ) is obtained by the soft-max function After obtaining the matrix V, it is necessary to perform L2 normalization on each column of D-dimensional vectors in V, convert the matrix ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



