Energy-saving type industrial robot and drive unit time-sharing control method thereof
A technology of industrial robots and drive units, which is applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., and can solve problems such as energy loss, large mass of moving parts of robots, and large inertia
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
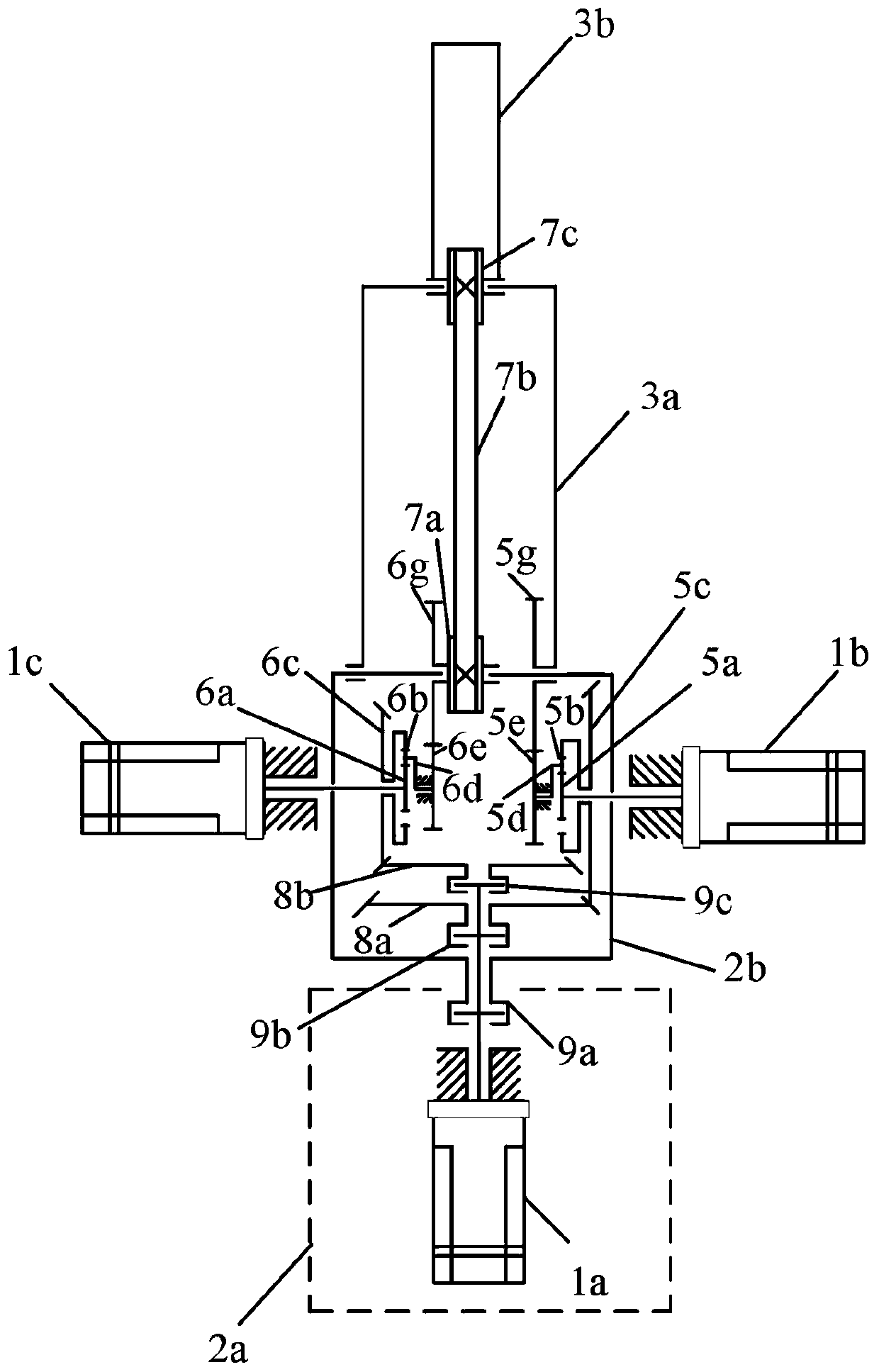
[0050] see figure 1 , an energy-saving industrial robot in this embodiment is provided with an arm base 2b on the base 2a, and is driven by the arm base drive unit 1a; a large arm 3a is provided at the top between the two clamping keys of the arm base 2b , and is driven synthetically by the arm seat drive unit 1a and the boom drive unit 1b through the first differential gear train;
[0051] The first differential gear train is composed of the first sun gear 5a, the first planetary gear 5b, the first ring gear 5c, and the first planet carrier 5d, and the first differential gear train is based on the first sun gear 5a and the first gear The ring 5c is the input end, and the first planet carrier 5d is the output end;
[0052] A small arm 3b is provided on the top of the large arm 3a, and is driven synthetically by the arm seat drive unit 1a and the small arm drive unit 1c through the second differential gear train;
[0053] The second differential gear train is composed of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More