

Underwater adsorption type obstacle crossing robot and obstacle crossing method thereof
A robot and adsorption technology, which is applied in the underwater adsorption obstacle-crossing robot and its obstacle-crossing field, can solve the problems of high safety risk, low detection efficiency, etc. strong effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
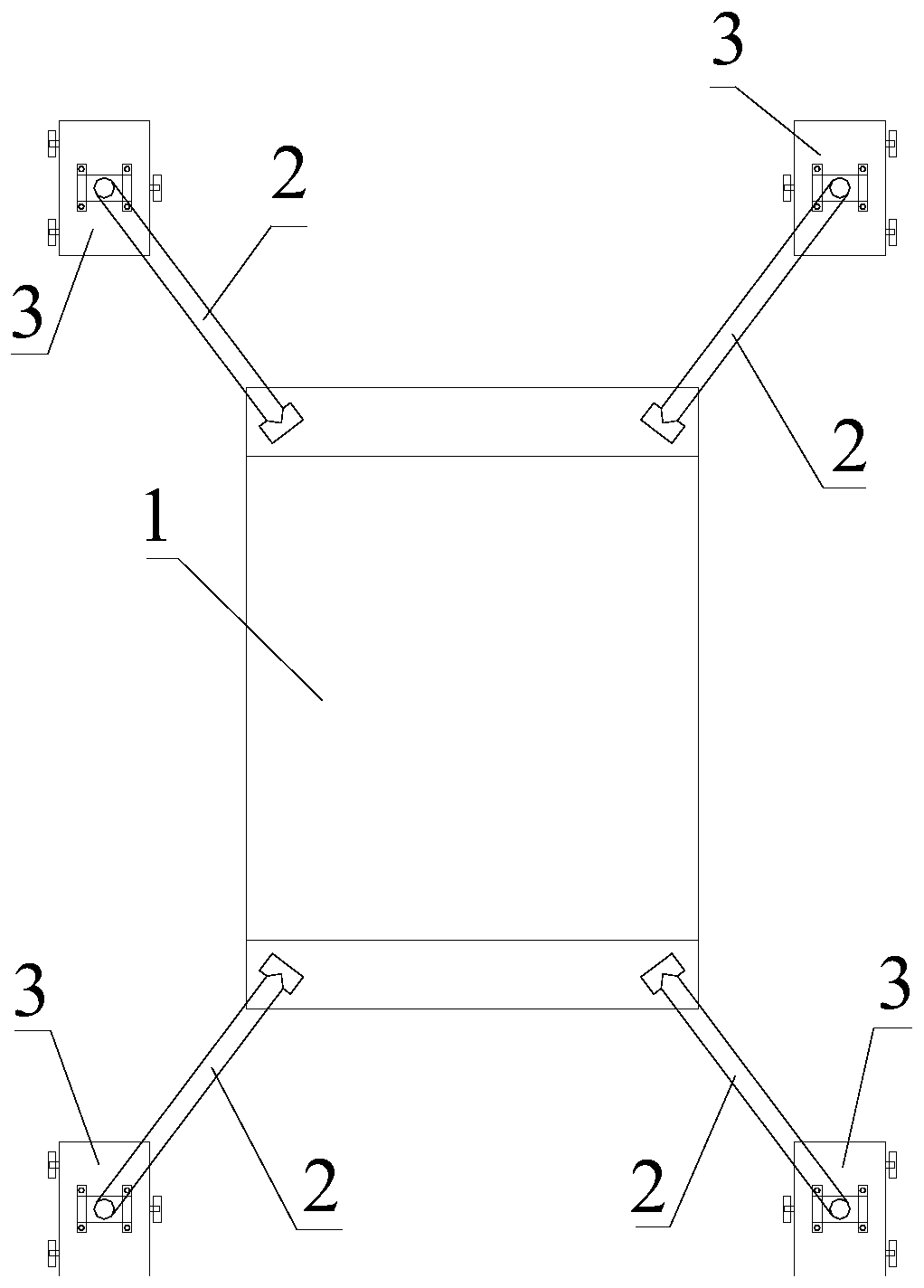
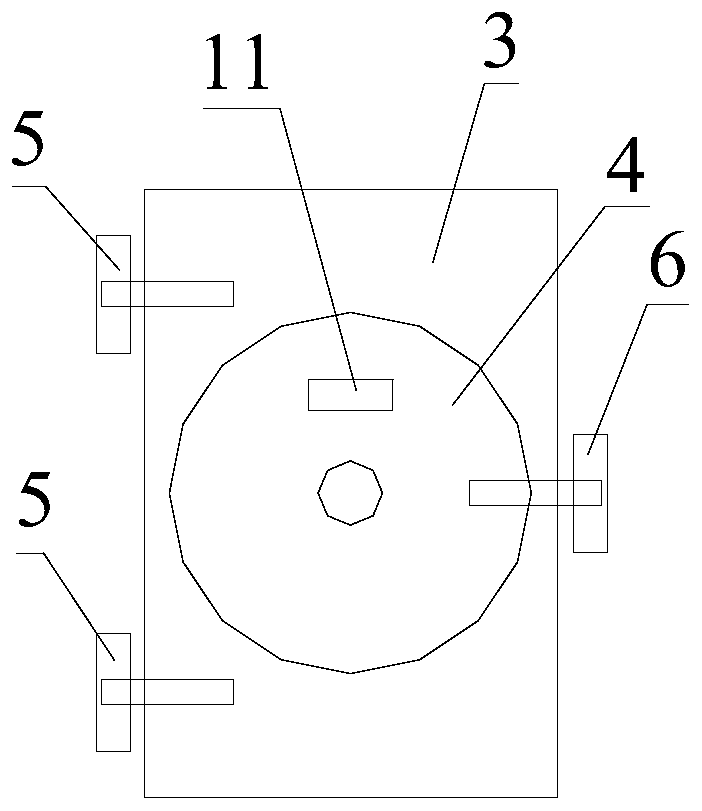
[0024] Such as figure 1 As shown, the underwater adsorption obstacle-crossing robot of the present invention includes a carrying platform 1, and the four corners of the carrying platform 1 are connected with wheel feet 3 through rotating joint legs 2, combined with image 3 As shown, the bottom of the wheel foot 3 is provided with a suction cup 4, the outer side of the wheel foot 3 is provided with two driving wheels 5 connected with the drive motor, and the inner side of the wheel foot 3 is provided with a driven wheel 6.
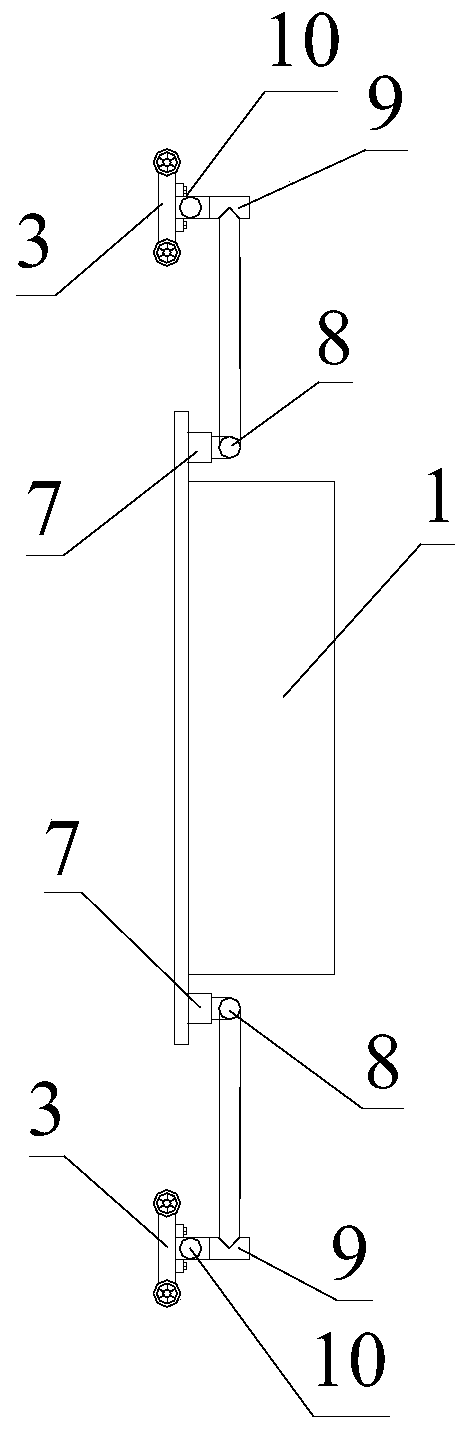
[0025] Such as figure 2 As shown, the swivel joint leg 2 includes a leg swivel joint 7 arranged on the bearing platform 1, a leg lift joint 8 arranged above and connected to the leg swivel joint 7, a foot swivel joint 9 connected with the leg lift joint 8, and one end connected The ankle joint 10 connected to t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More