

Rope-driven multi-joint flexible mechanical arm and robot
A flexible manipulator and multi-joint technology, applied in the field of robotics, can solve the problems of difficult application of non-cooperative target capture, complex rigid manipulator structure, and prone to rigid collisions, etc., to achieve overall softness, small mass and space ratio, and deformation flexible effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
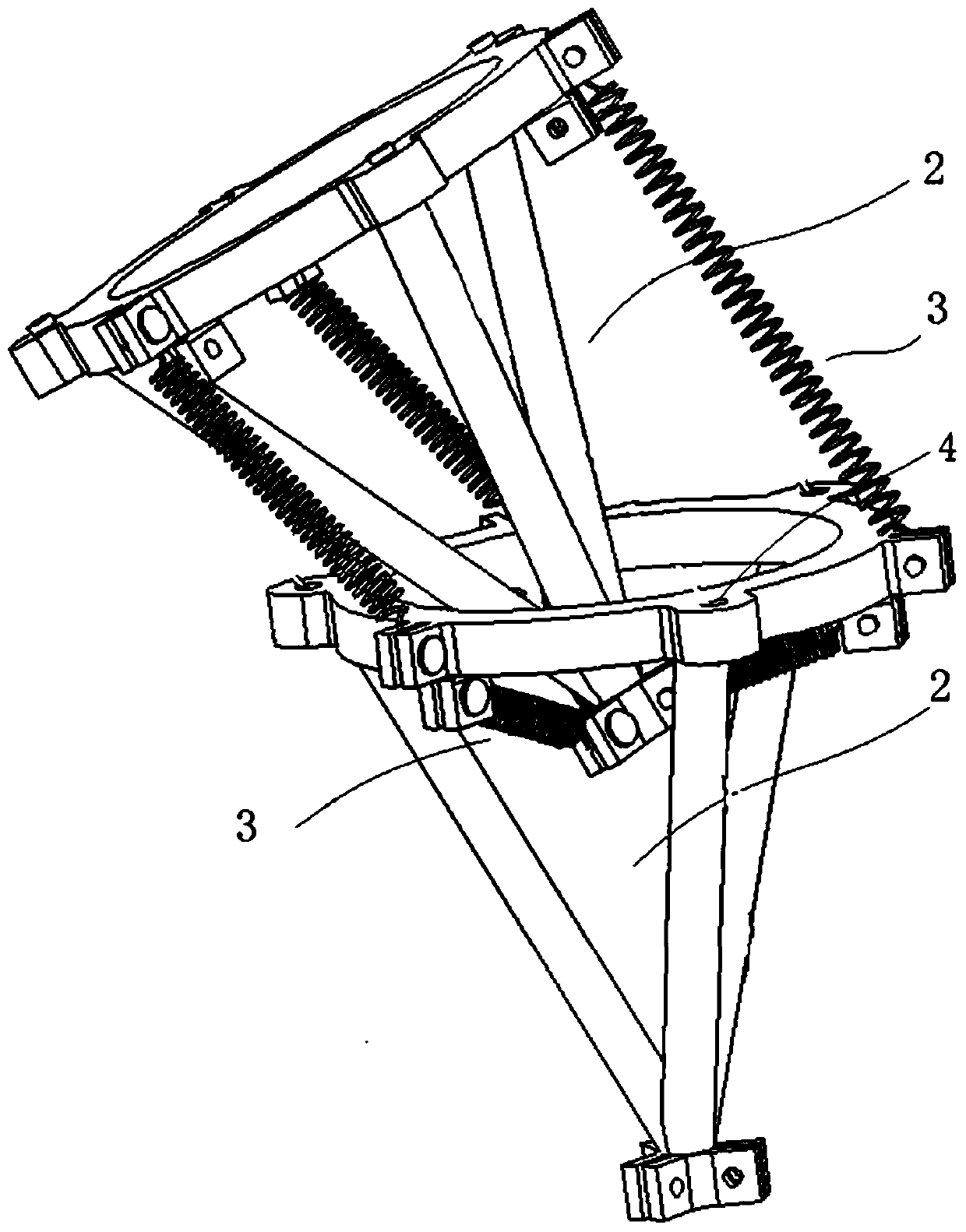
[0040] A rope-driven multi-joint flexible mechanical arm, such as figure 1 As shown, it includes several joint rod units 2( figure 1 Two of the adjacent articulated rod units 2) are shown in the drawing. The articulated rod units 2 are connected in series along the axial direction. In any two adjacent articulated rod units 2, the bottom part of a joint rod unit 2 is sleeved At the top end of another joint rod unit 2, and the top end of one joint rod unit 2 and the top end of the other joint rod unit 2 are flexibly connected by a spring assembly 3, the bottom end of one joint rod unit 2 and the other joint rod unit 2 The top end of the rod is flexibly connected by the spring assembly 3, and the joint rod unit 2 is provided with a number of rope holes 4, and the rope holes 4 are evenly distributed along the circumferential direction.
[0041] In the rope-driven multi-joint flexible mechanical arm provided by this embodiment 1, each joint lever unit 2 of the mechanical arm is flexibl...
Embodiment 2
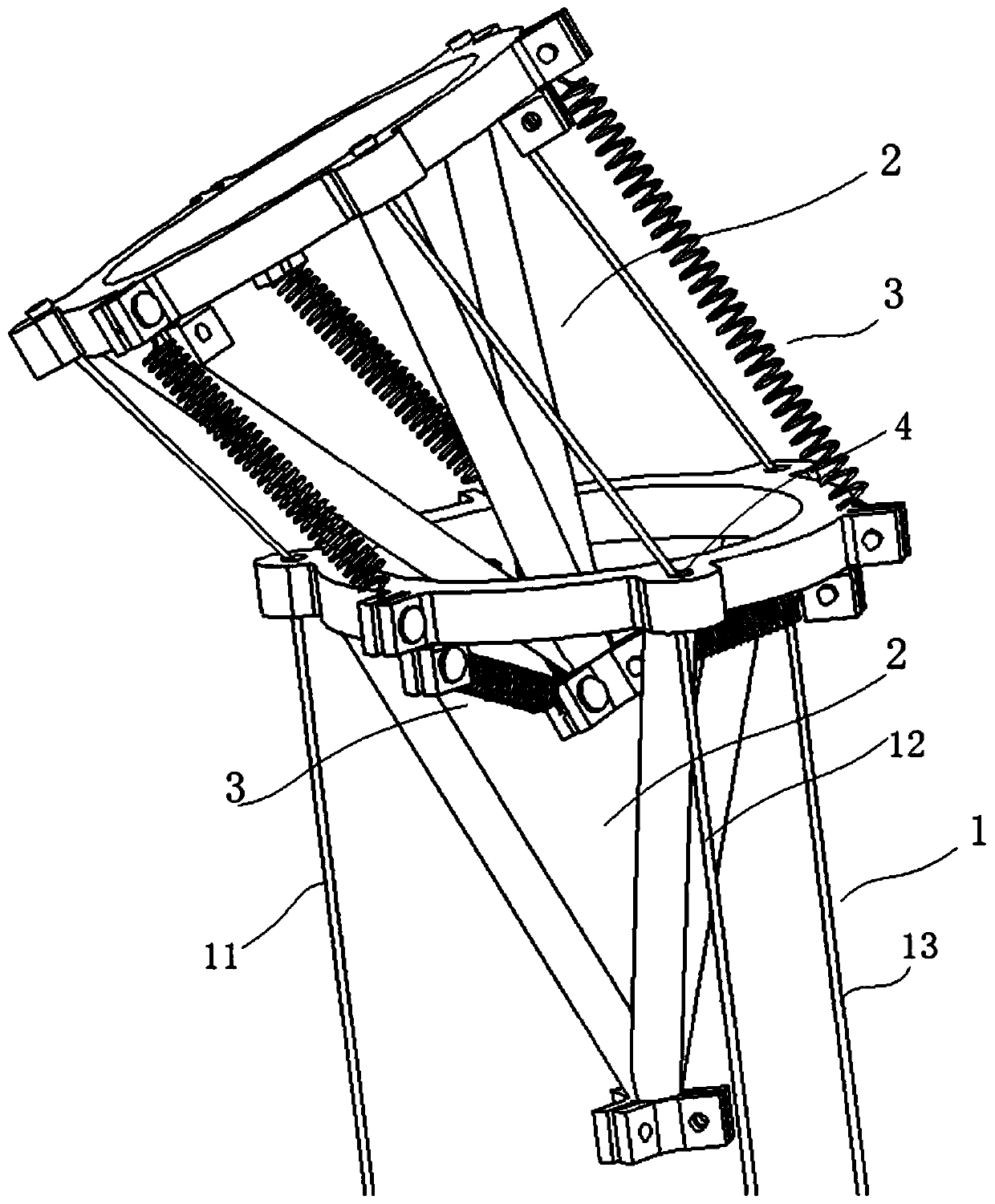
[0048] A rope-driven multi-joint flexible mechanical arm, such as Figure 3~5 As shown, a plurality of joint rod units 2 are included, and the joint rod units 2 are connected in series along the axial direction. In any two adjacent joint rod units 2, the bottom part of one joint rod unit 2 is sleeved on the other joint rod unit 2, and the top end of one joint rod unit 2 and the top end of the other joint rod unit 2 are flexibly connected through the spring assembly 3. The bottom end of one joint rod unit 2 and the top end of the other joint rod unit 2 pass through the spring assembly 3 Make flexible connections.
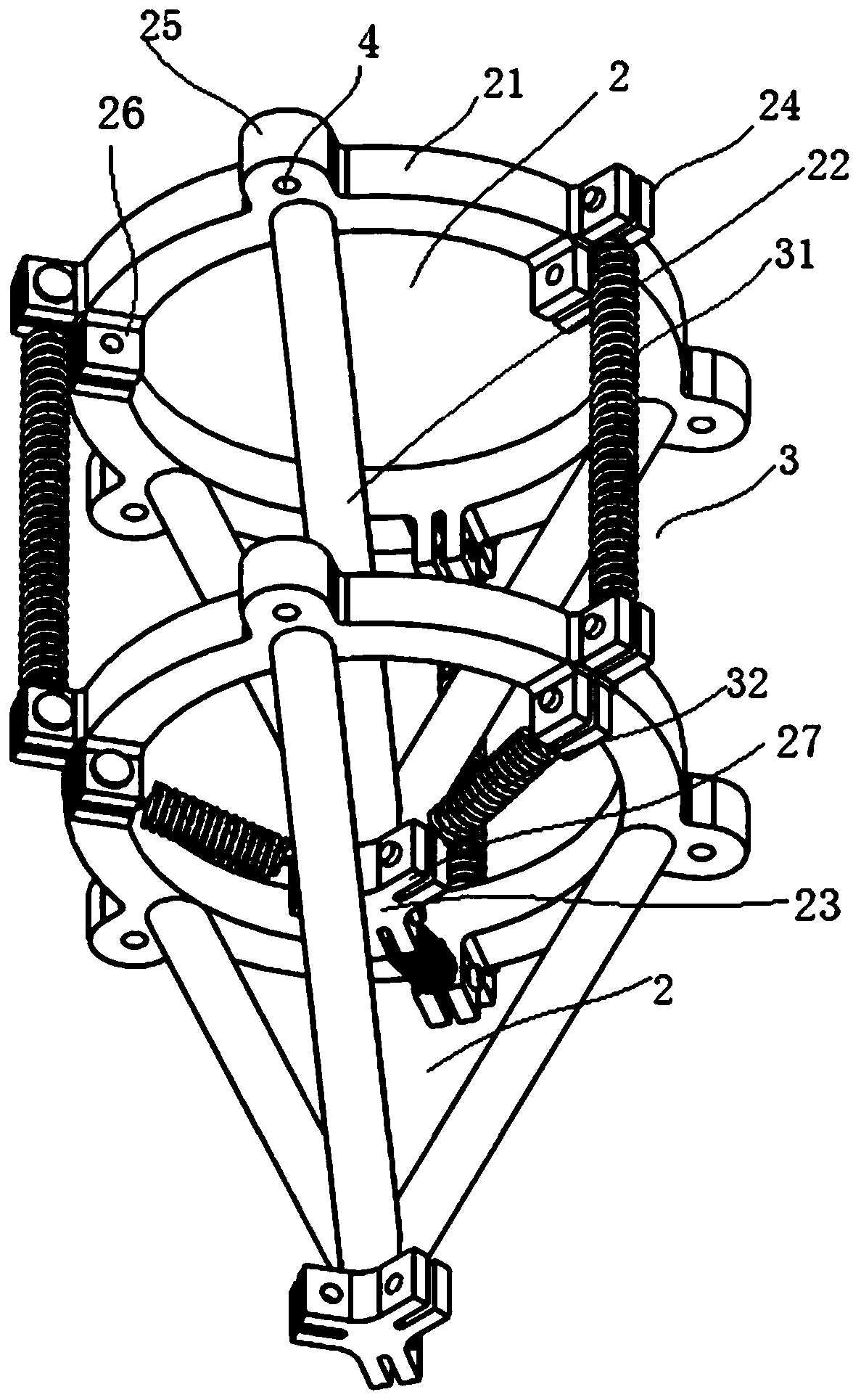
[0049] Where as Figure 6-8 As shown, the articulating rod unit 2 includes an annular bracket 21, three legs 22, and a concentrated member 23. One end of the leg 22 is connected to the annular bracket 21 and is evenly distributed along the circumferential direction of the annular bracket 21. The other end of the leg 22 is converged and connected to the concentrating pie...
Embodiment 3
[0062] The rope-driven multi-joint flexible manipulator provided in the third embodiment is a modification of the second embodiment. The difference is that the direction of use is opposite to that of the second embodiment, such as Figure 13 As shown, the driving rope 1 is connected downward to the driving device.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More