

Bus control manner self-growing soft robot based on flexible circuit
A flexible circuit and bus control technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as complex circuits, difficulty in integration, and high rigidity of control circuits, and achieve the effect of solving rigidity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
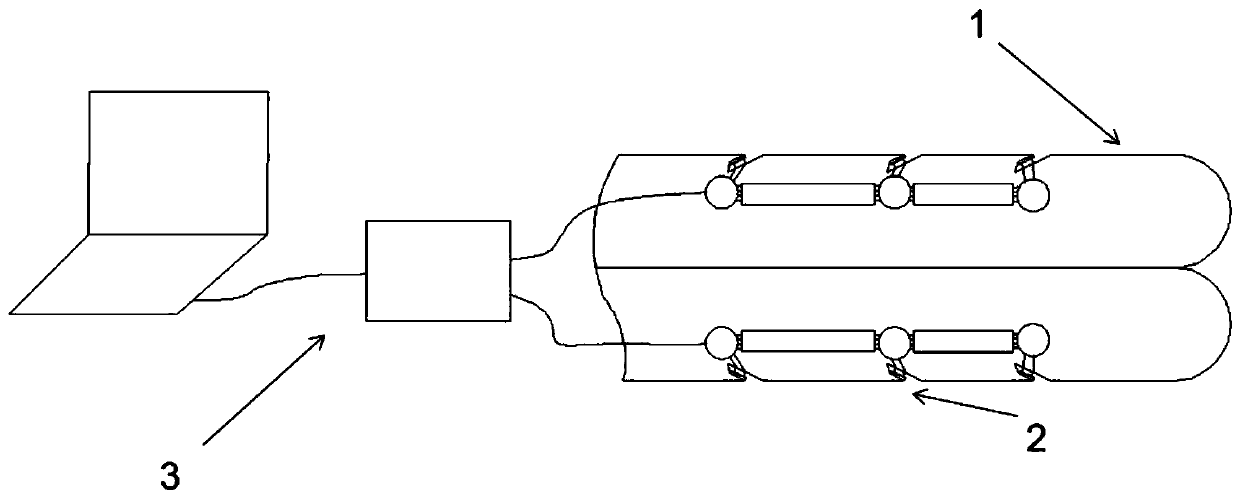
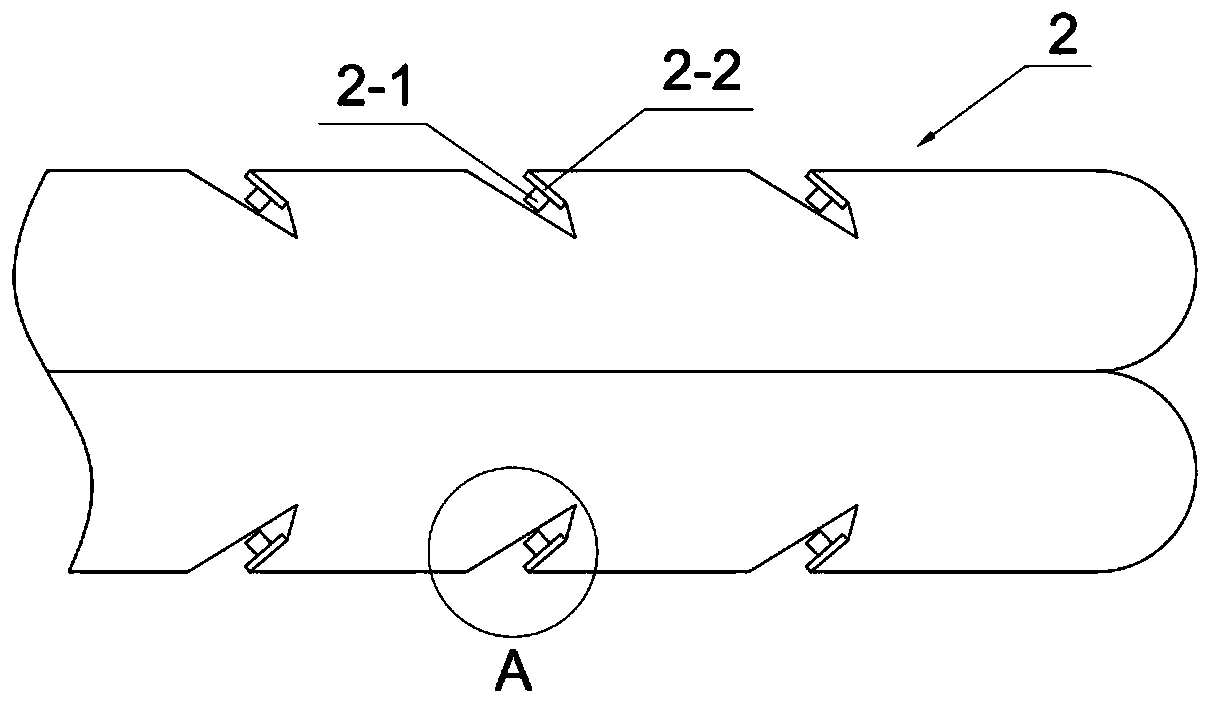
[0024] Combine below Figure 1-6 Describe this embodiment, a self-growing soft robot based on a flexible circuit bus control method, including a self-growing soft robot growing body 1, a plane steering mechanism 2, and a bus-type control system 3, the bus-type control system 3 includes a flexible circuit 3-3 and the circular controller 3-4, the top of the growing body 1 of the self-growing soft robot is folded inwards and wound orderly, the growing body 1 of the self-growing soft robot is inflated and turned outwards to grow forward, and the self-growing soft robot grows The outer surface of the main body 1 is symmetrically and evenly distributed with multiple fold structures on both sides of the axial direction, and each fold structure is equipped with a plane steering mechanism 2, and the inner side of each plane steering mechanism 2 is connected with a circular controller 3-4 , two adjacent circular controllers 3-4 are connected by a flexible circuit 3-3; when installing th...
specific Embodiment approach 2
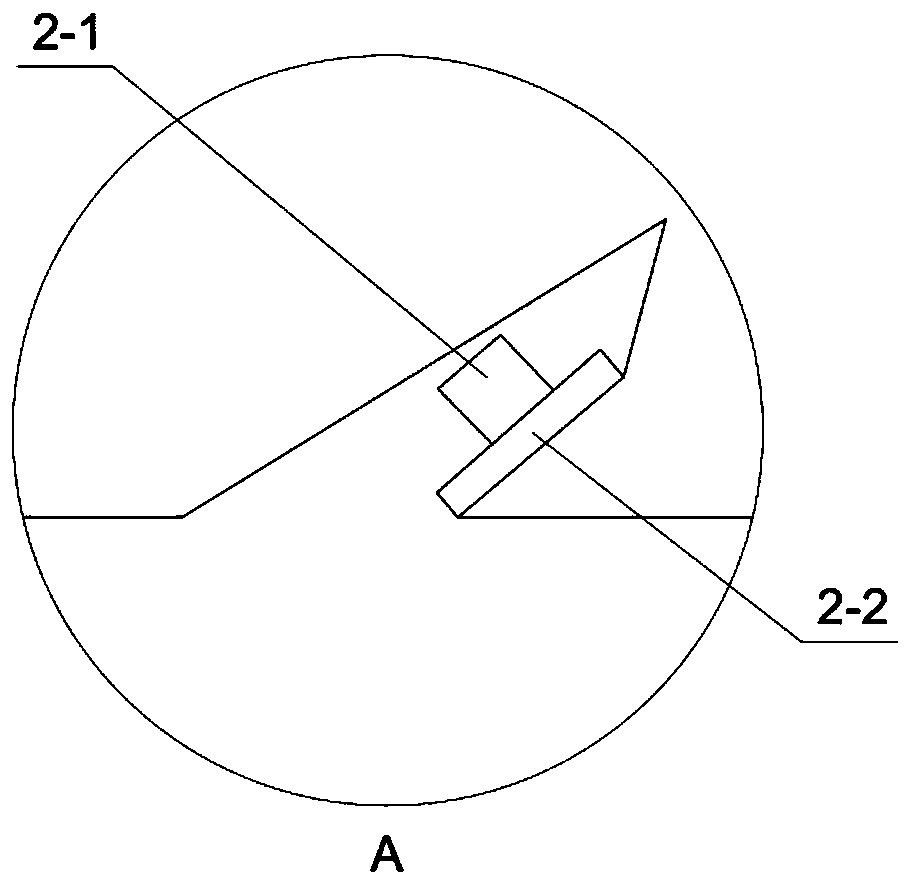
[0026] Combine below Figure 1-6 Illustrate this embodiment, this embodiment will further describe the first embodiment, the plane steering mechanism 2 includes a de-energized electromagnet 2-1 and an industrial soft iron disc 2-2, a de-energized electromagnet 2-1 and an industrial The soft iron disc 2-2 attracts and maintains the wrinkled structure, and the de-energized electromagnet 2-1 separates from the industrial soft-iron disc 2-2 to release the wrinkled structure; the de-energized electromagnet 2-1 protrudes two positive The negative leads are respectively connected to the high and low level interfaces of the circular controller 3-4. When the wrinkle structure needs to be kept in a state, it is necessary to cut off the power of the de-energized electromagnet 2-1, and both interfaces are at low level state, the de-energized electromagnet 2-1 forms a magnetic field due to the existence of the internal permanent magnet so that the upper surface attracts the industrial soft...
specific Embodiment approach 3
[0028] Combine below Figure 1-6 This embodiment will be described. This embodiment will further describe the first embodiment. The bus control system 3 also includes a computer 3-1 and an RS232 communication controller 3-2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More