

Robot navigation space reduction method
A robot and space technology, applied in the field of robot navigation, which can solve the problems of large amount of calculation, slow convergence speed and insufficient smooth planning path of robot navigation algorithm.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0062] Below in conjunction with accompanying drawing and embodiment the application is further described:
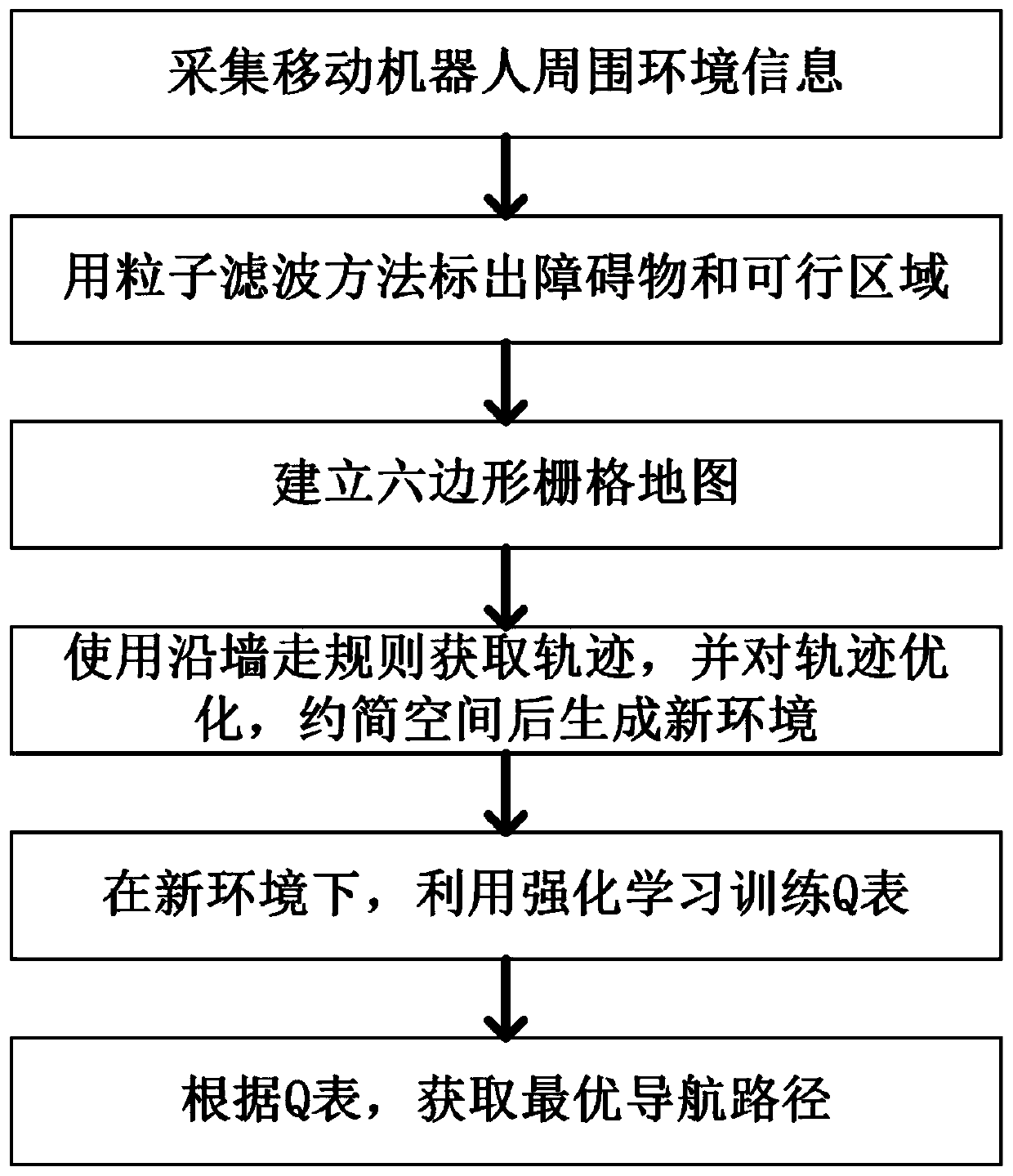
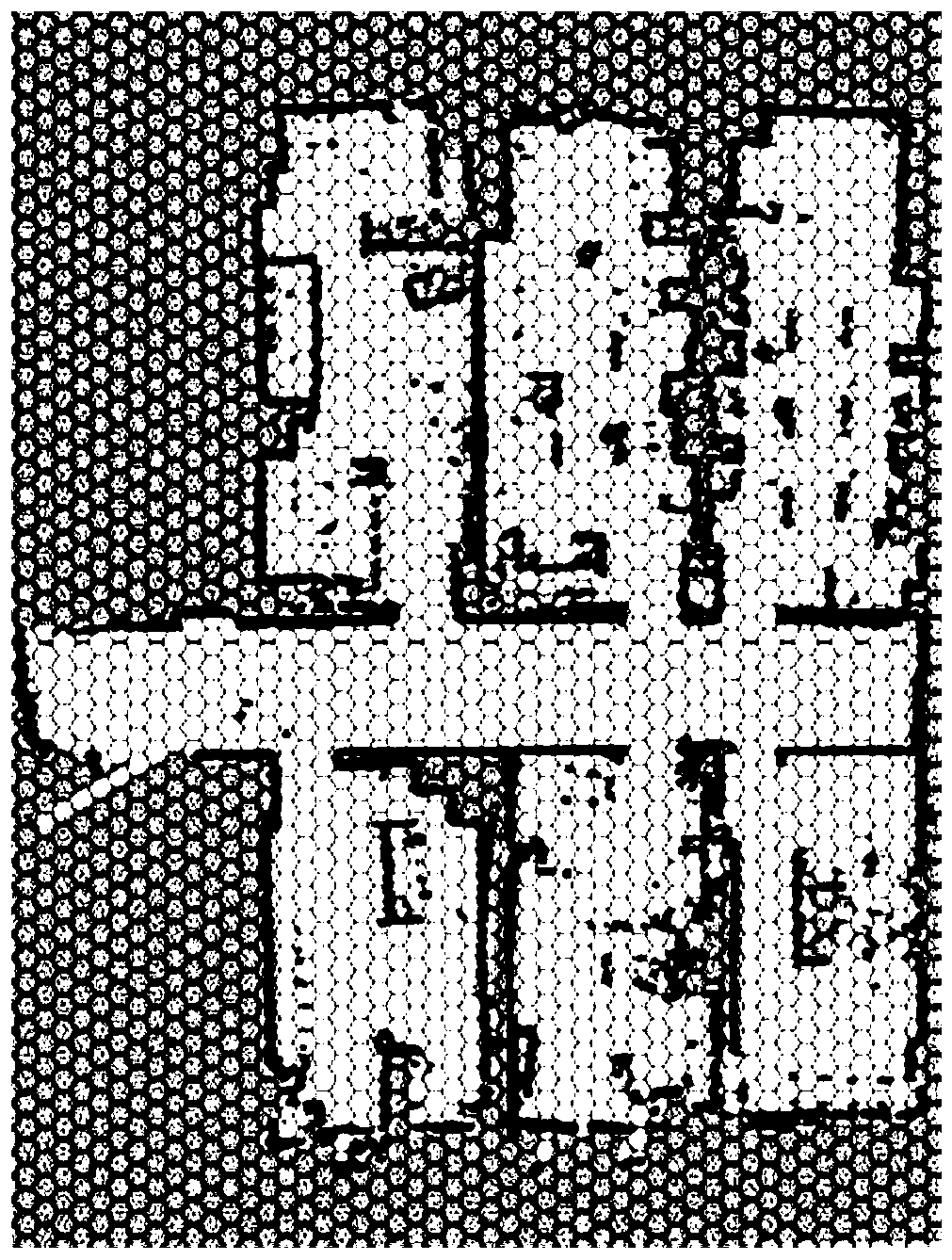
[0063] This application provides a method for reducing the robot navigation space, such as figure 1 shown, including the following steps:
[0064] (1) Start the robot, use the robot's sensors (such as laser radar, RGB-D camera) to scan the surrounding environment, perform data fusion on the surrounding environment data, obtain the surrounding environment information and perform dynamic updates; including:
[0065] According to the fusion of the depth image information acquired by the RGB-D camera and the data scanned by the lidar, the scanning local range information of the camera is calculated according to the calculation formulas (1-1) and (1-2), and then the RGB-D D The "scan range" of the camera:
[0066]
[0067]
[0068]
[0069] where r R ,r C ,r L are three-dimensional vectors, respectively representing the rightmost, middle and leftmost coordinate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More