

Vehicle pose correction method and device
A vehicle, pose technology, applied in the field of autonomous driving, can solve the problem of low positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
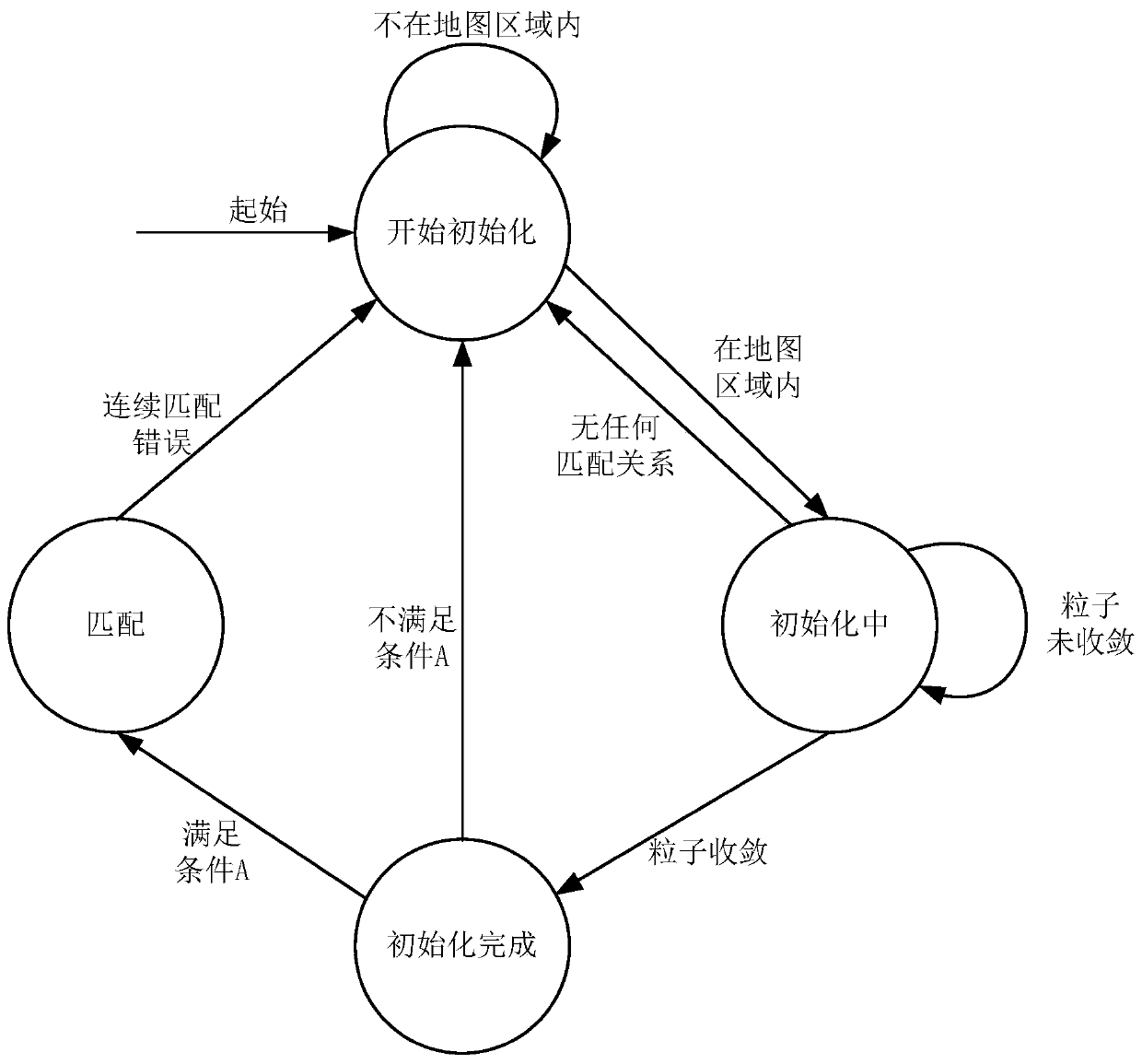
[0101] see Figure 2a , Figure 2a It is a schematic flowchart of a vehicle pose correction method provided by an embodiment of the present invention. This method is applied to automatic driving. This method is typically applied to the scene where the vehicle enters the area corresponding to the prior position covered by the preset navigation map for the first time. When the target is high, the correct target matching relationship between the perception image and the preset navigation map is generated, and the target matching relationship is used to optimize the vehicle body pose with centimeter-level positioning accuracy. The method provided in this embodiment can be executed by a device for correcting the vehicle pose, which can be realized by means of software and / or hardware, and can generally be integrated in a vehicle-mounted terminal such as a vehicle-mounted computer or a vehicle-mounted industrial personal computer (IPC). , the embodiments of the present invention a...
Embodiment 2
[0135] see Figure 3a , Figure 3a It is a schematic flowchart of a vehicle pose correction method provided by an embodiment of the present invention. On the basis of the above-mentioned embodiments, this embodiment optimizes the search process of the map elements projected onto the perception image. Such as Figure 3a As shown, the method includes:
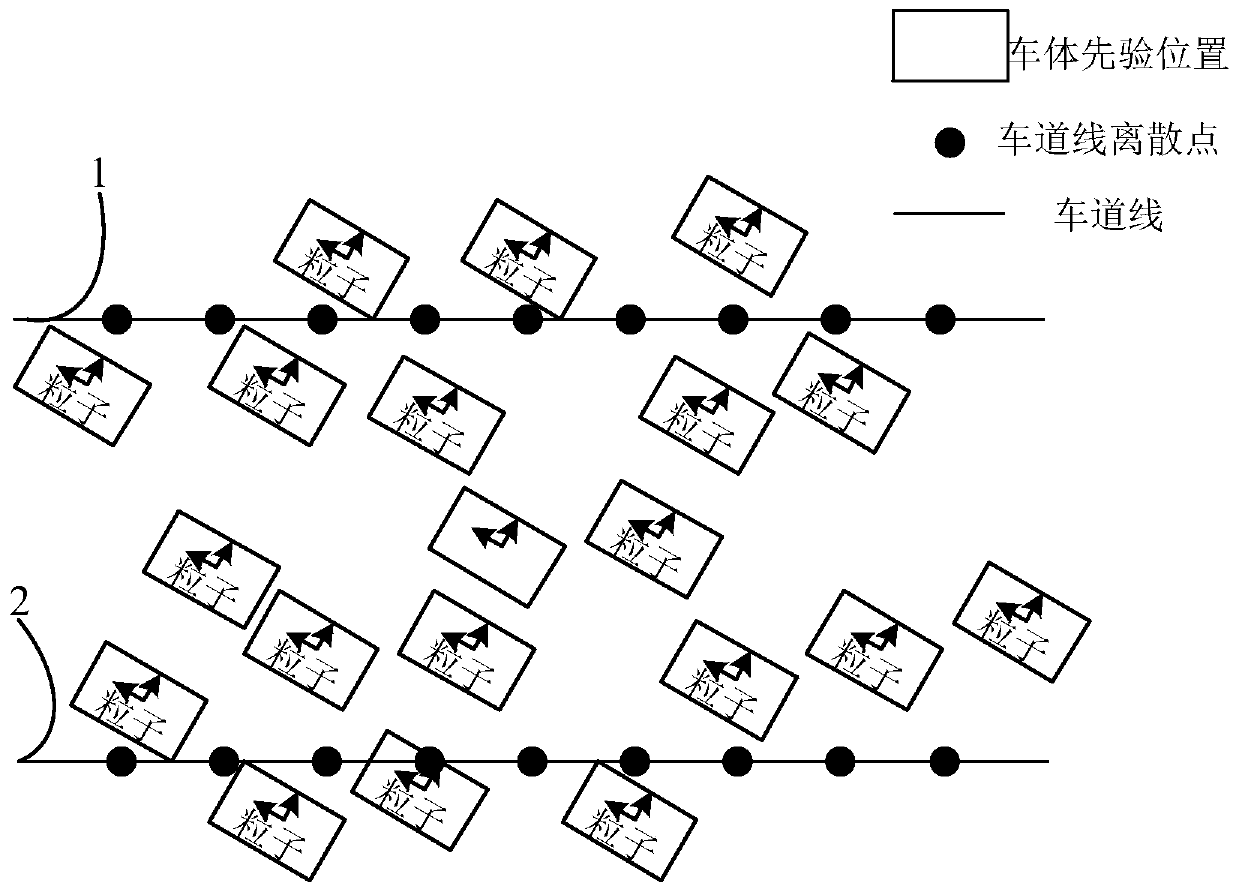
[0136] 210. When it is detected that there is a coverage area corresponding to the prior position of the vehicle body in the preset navigation map, perform particle sampling of the vehicle position information based on the prior position of the vehicle body.
[0137] 220. For any sampled particle, determine the position information of the particle at the current moment.
[0138] 230. Convert the map elements in the world coordinate system that meet the fourth set distance from the prior position of the vehicle body to the camera coordinate system.
[0139] Among them, the camera coordinate system is defined as the x-axis fac...
Embodiment 3
[0150] see Figure 4 , Figure 4 It is a schematic flowchart of a vehicle pose correction method provided by the embodiment of the present invention. On the basis of the above embodiments, this embodiment updates the weight information corresponding to each particle and the relationship between the perceived image and the preset navigation map. The establishment process of the target matching relationship has been optimized. Such as Figure 4 As shown, the method provided in this embodiment specifically includes:
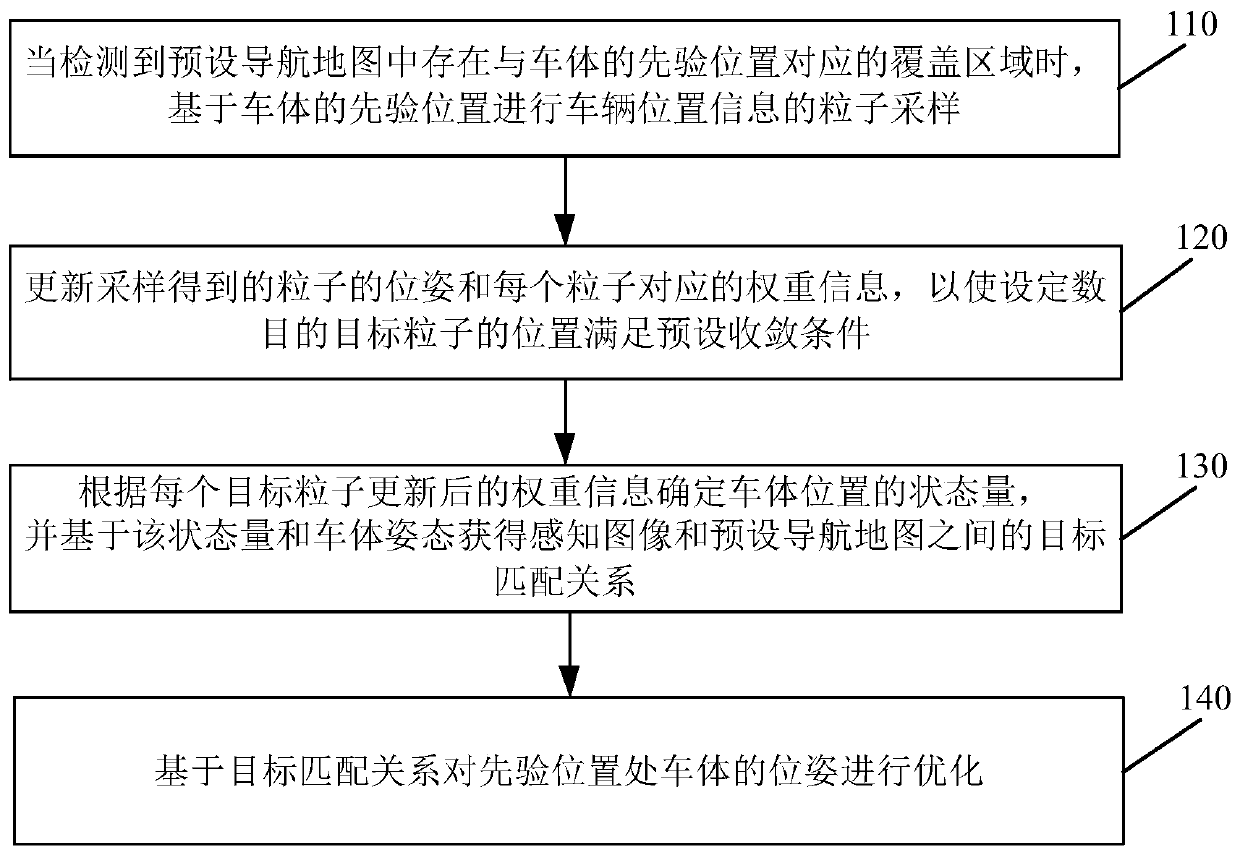
[0151] 310. When it is detected that there is a coverage area corresponding to the prior position of the vehicle body in the preset navigation map, perform particle sampling of the vehicle position information based on the prior position of the vehicle body.
[0152] 320. Update the sampled particle poses and weight information corresponding to each particle, so that the positions of a set number of target particles meet a preset convergence condition.
[0153] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More