

Automatic driving trajectory generation method in high-speed scene
A technology for automatic driving and trajectory generation. It is used in navigation, instrumentation, mapping, and navigation. It can solve problems such as discontinuous curvature, difficulty in determining key parameters, and low computational complexity, achieving continuous results, meeting real-time requirements, and reducing computational costs. amount of effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] Below in conjunction with specific embodiment, further illustrate the present invention, should be understood that these embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention, after having read the present invention, those skilled in the art will understand various equivalent forms of the present invention All modifications fall within the scope defined by the appended claims of the present application.
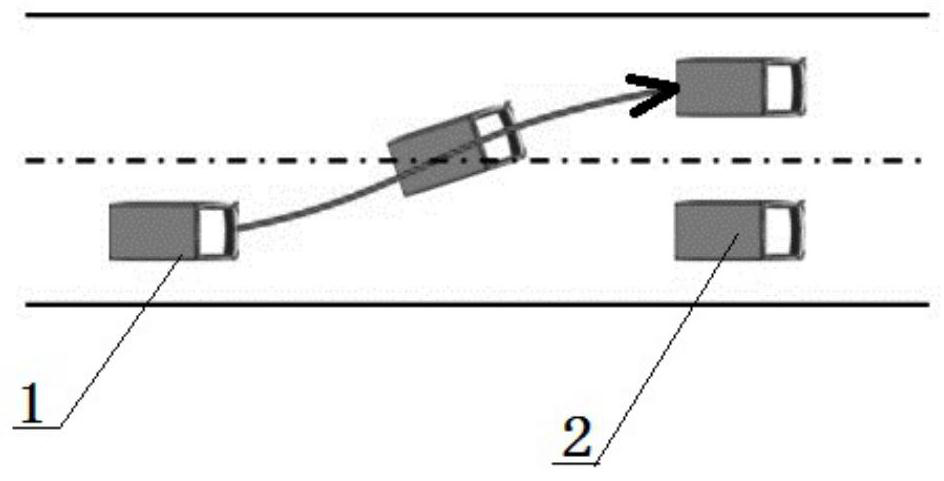
[0071] Such as figure 1 As shown, the vehicle driving road is a two-lane lane with a width of 3.5 meters. The size of the unmanned vehicle 1 is 7000mm*2200mm*4000mm. The high-speed radar finds that there is a stationary vehicle 2 in front. In order to avoid rear-end collision, it is necessary to change lanes as shown by the arrow in the figure.
[0072] Apply the automatic driving trajectory generation method under a kind of high-speed scene of the present invention, comprise improved Dijkstra al...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More