Robot movement plane calibration system and method
A technology of robot movement and calibration system, which is applied in the direction of manipulators and manufacturing tools, which can solve the problems of time-consuming, inaccurate and laborious, and achieve the effect of fast and accurate calibration and avoiding large errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] In order to describe the content, structural features, achieved goals and effects of the present invention in detail, the following will be described in detail in combination with the embodiments and accompanying drawings.
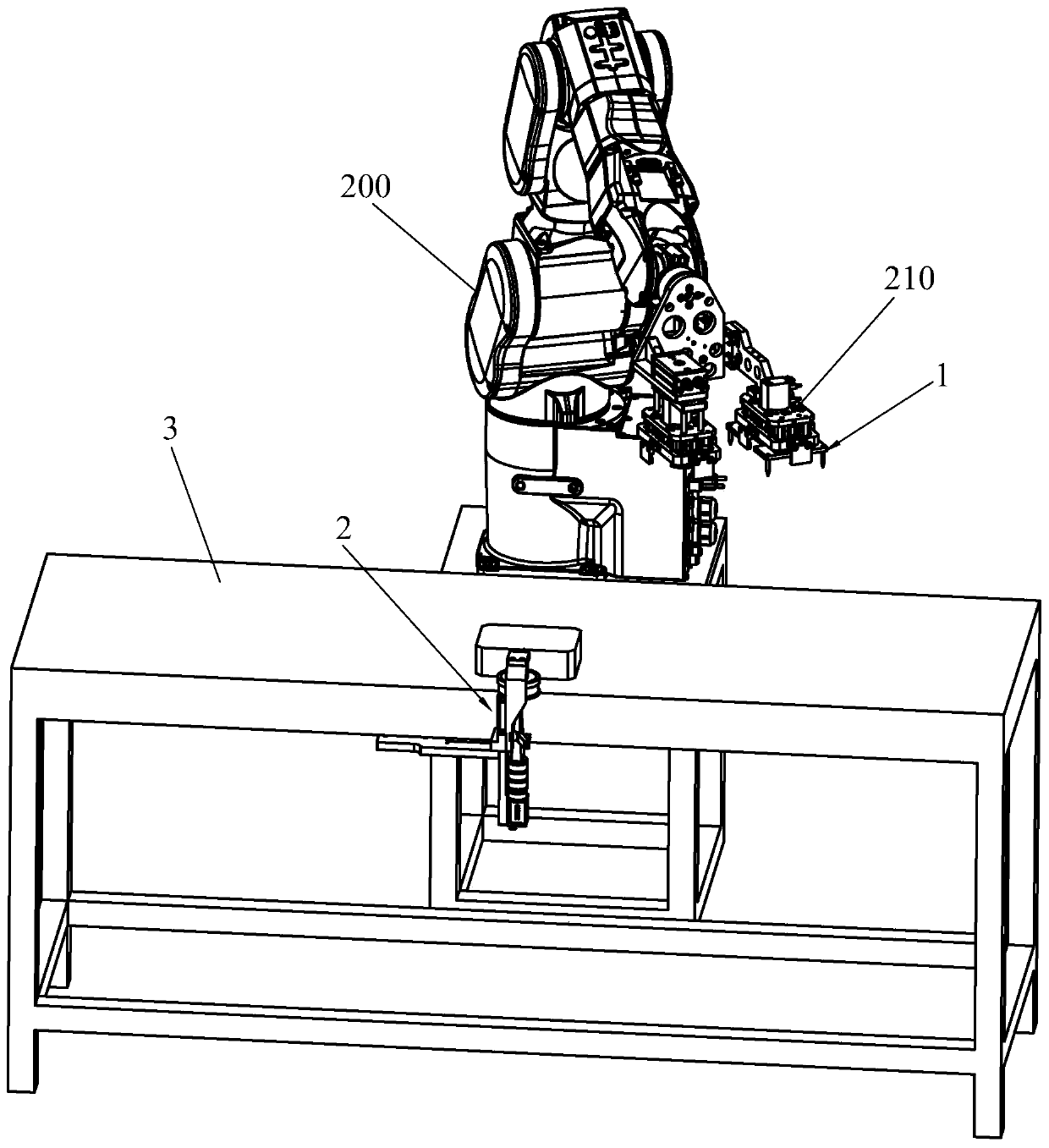
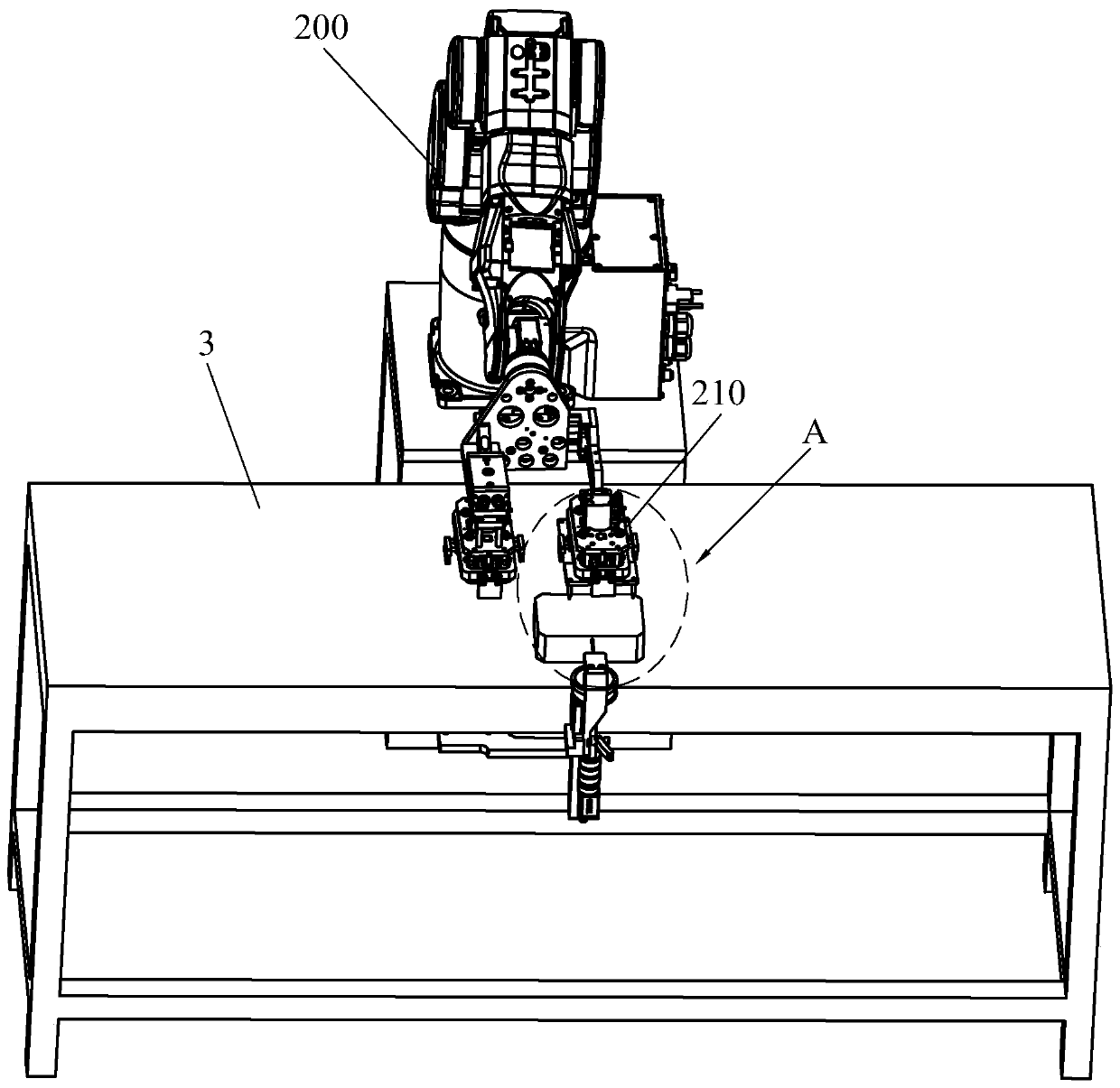
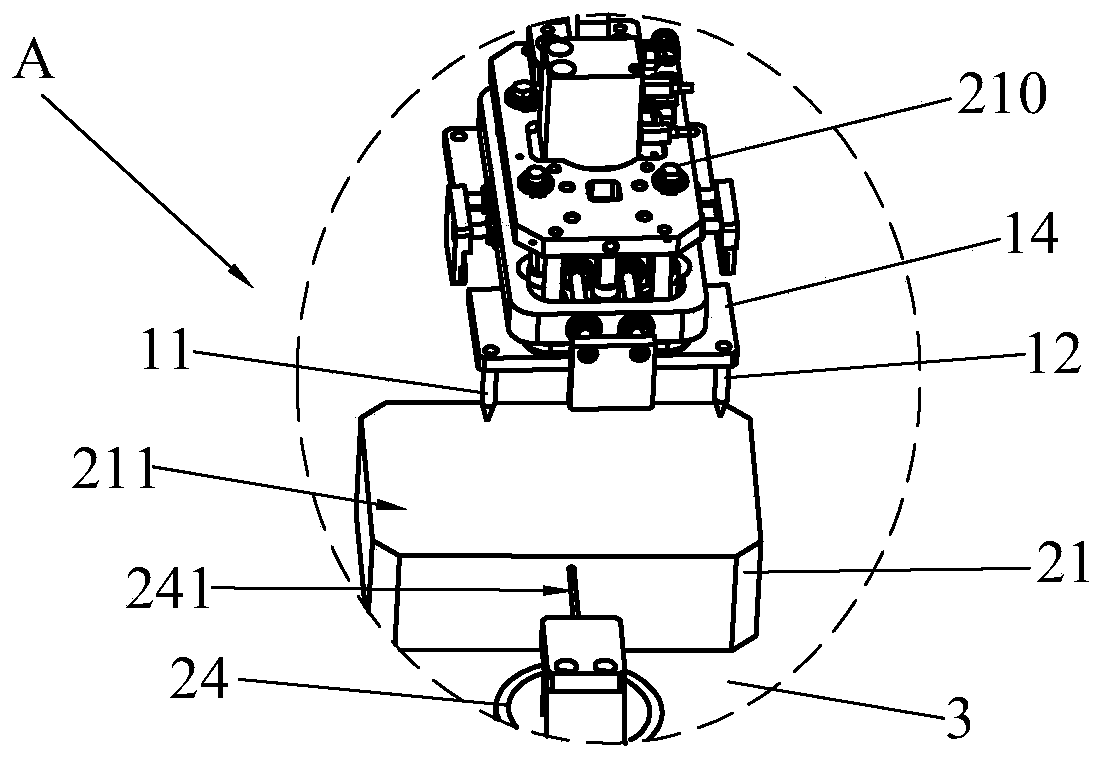
[0044] see Figure 1 to Figure 9, the present invention discloses a plane calibration system for robot motion, which is used to calibrate the horizontal plane of the end effector 210 (such as grippers, etc.) 200 operating accuracy. Specifically, the robot motion plane calibration system of the present invention includes a detection structure 1, a camera device 2 and a processor (not shown in the figure), and the detection structure 1 is used to be installed on the end effector 210 of the robot 200, which includes a first The detection part 11, the second detection part 12 and the third detection part 13, the first detection part 11, the second detection part 12, and the third detection part 13 are not on the same straight line and the lower end fac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com