Kalman and wavelet fused MEMS gyroscope self-adaptive anti-outlier denoising method
A Kalman filter and gyroscope technology, applied in CAD numerical modeling, design optimization/simulation, etc., can solve problems such as zero bias instability, MEMS gyroscope signal angle random walk, etc., to improve accuracy, reduce errors, Effect of suppressing low-frequency noise
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
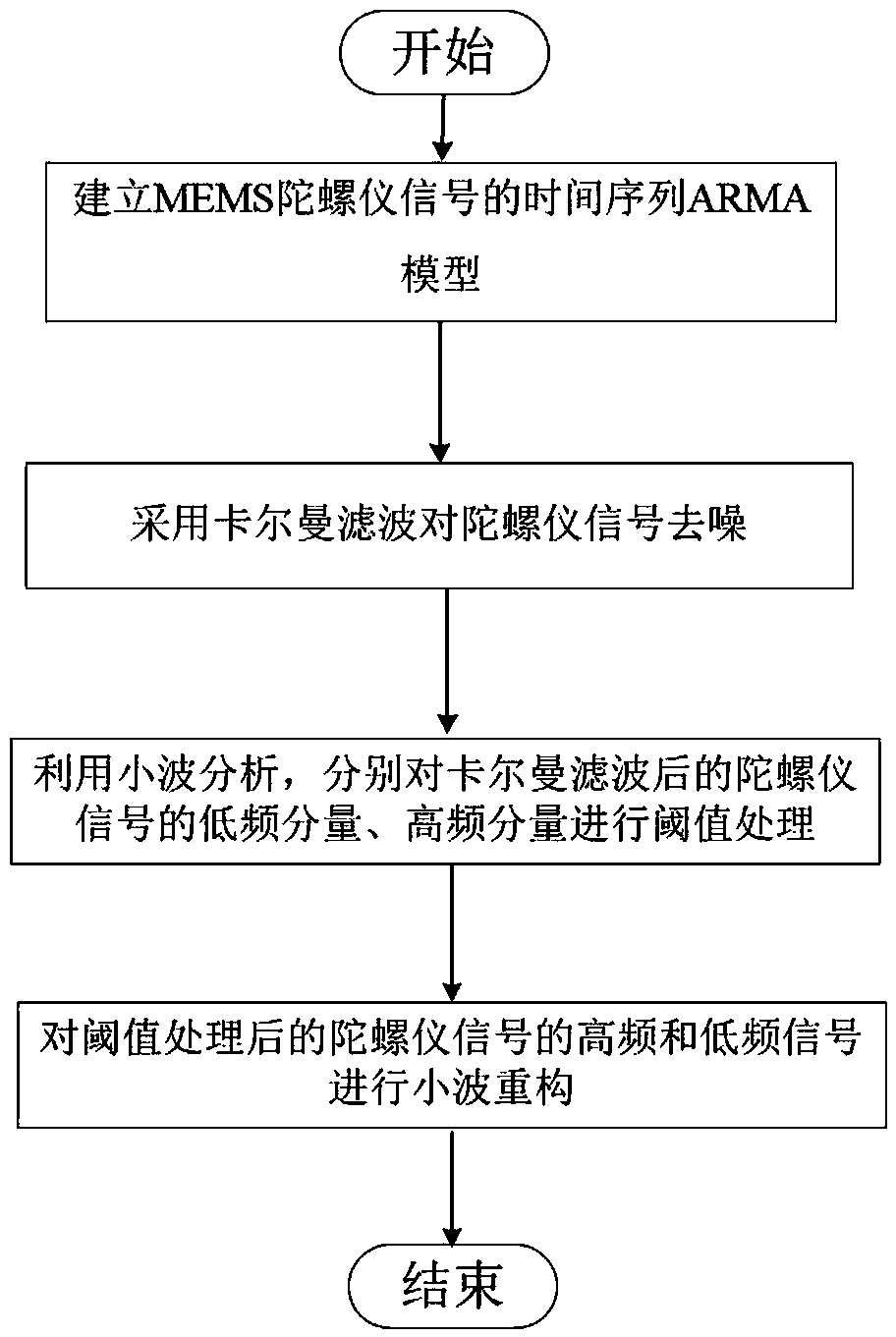
[0042] Such as figure 1 It is shown that the MEMS gyroscope adaptive anti-outlier denoising method that combines Kalman and wavelet includes the following steps,
[0043] Step 1: Build a time-series ARMA model of the MEMS gyroscope signal:
[0044] Extract the trend item and period item in the original signal of the MEMS gyroscope, and then establish a time series ARMA model for its residual, and use the final forecast error FPE criterion to determine the order of the model, and obtain the random drift error model of the MEMS gyroscope as the AR(1) model ,Expressed as:
[0045] m k+1 =am k +ξ k+1
[0046] where m k ,m k+1 Respectively represent t k moment and tk+1 Gyroscope error at time, a is the autoregressive coefficient, ξ k+1 for t k+1 momentary white noise;
[0047] Step 2: Denoise the gyroscope signal by using Kalman filter;
[0048] Step 2.1: Establish the state equation and measurement equation of the Kalman filter according to the AR(1) model obtained in ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



