

Improved mixed Gaussian particle filtering method used in inertial integrated navigation system
A technology of integrated navigation system and navigation system, which is applied in the field of improved hybrid Gaussian particle filter used in inertial integrated navigation system, can solve the problems of filtering accuracy influence, large amount of calculation, large number of particles, etc., and solve the problem of nonlinear filtering , Good nonlinear filtering problem, improve the effect of filtering accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] Below in conjunction with accompanying drawing, the technical scheme of invention is described in detail:
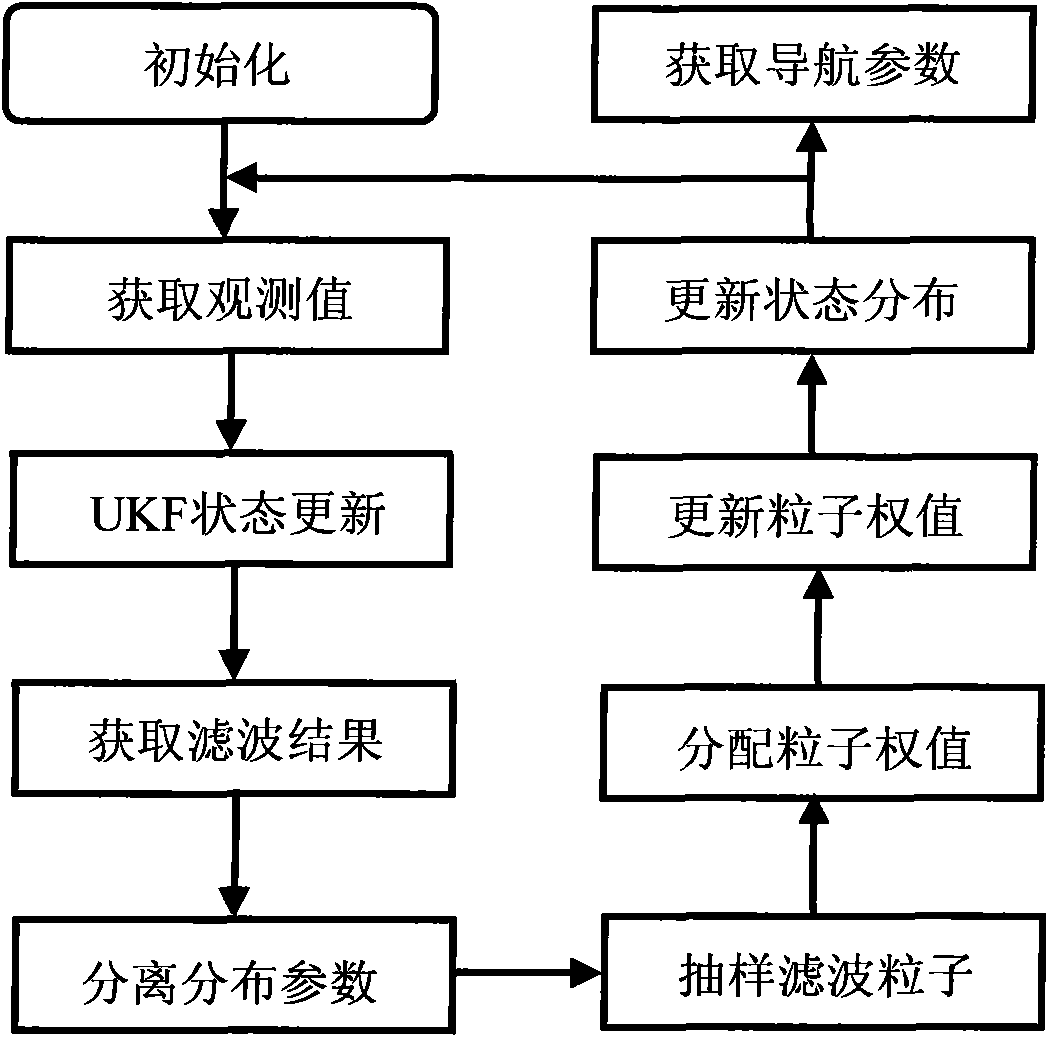
[0036] Such as figure 1 As shown, firstly, the state equation, observation equation and noise model of the SINS / GPS integrated navigation system are established according to the characteristics of inertial integrated navigation; according to the characteristics of the model, a hybrid Gaussian-Gaussian particle filter algorithm structure that meets the requirements is established. According to the above algorithm structure, the particle filter is divided into two steps, and the UKF algorithm is used to obtain the Gaussian distribution parameters in the state update process of the hybrid Gaussian particle filter. The particle filter algorithm is used to implement the state update and other algorithms, and the algorithm flow of the mixed Gaussian particle filter is given. According to the filtering model and algorithm flow of inertial integrated navigation, the nav...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More