

Automotive radar target tracking method of iterative square root CKF (Cubature Kalman Filtering) on the basis of noise compensation
A target tracking and automotive radar technology, applied in the field of target tracking, can solve problems such as state estimation errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in detail below with reference to the accompanying drawings and specific embodiments.
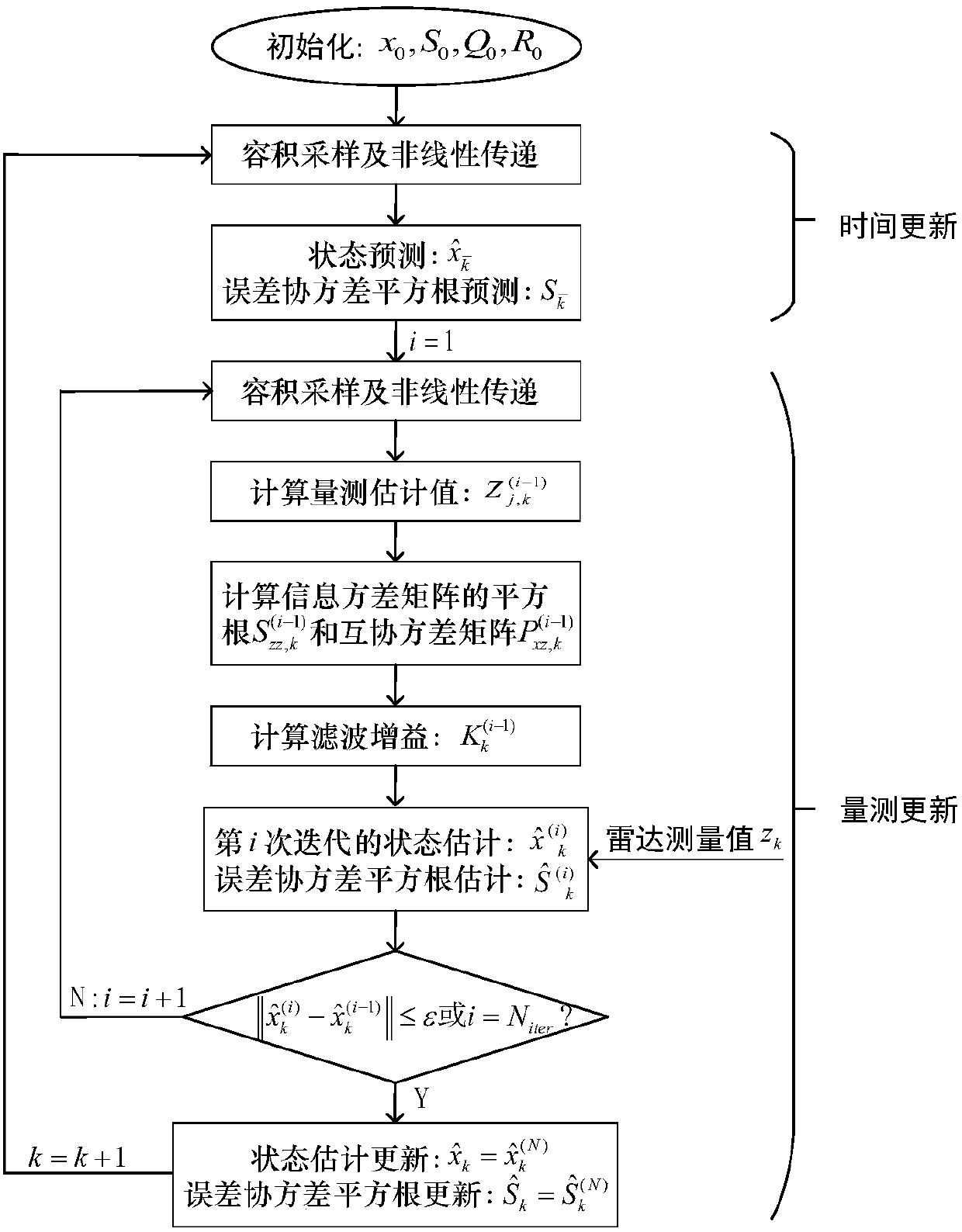
[0042] figure 1 It is the invention flow chart of the present method, specifically as follows:
[0043] 1. Kinematics model and observation model of vehicle radar target tracking;
[0044] Ignoring the height factor, in the x-y two-dimensional Cartesian coordinate system, define the motion state of the target to be measured next to the car body as a 6-dimensional state vector, namely Each variable of the vector represents the target lateral distance x and lateral velocity in the vehicle body coordinate system at time k respectively , lateral acceleration , longitudinal distance y, longitudinal velocity and longitudinal acceleration , the superscript T is the transpose of the matrix or vector, the same below. ;
[0045] The target informa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More