

Alignment method of an underwater large misalignment angle based on SINS (Strapdown Inertial Navigation System)/DVL (Doppler Velocity Log) of SRQKF (Square-root Quadrature Kalman Filter)
A technology with a large misalignment angle and a configuration method, which is applied in the field of strapdown inertial navigation and integrated navigation, and can solve the problems of low accuracy, slow convergence speed, and inability to obtain high accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0112] The present invention will be further described below in conjunction with the accompanying drawings.
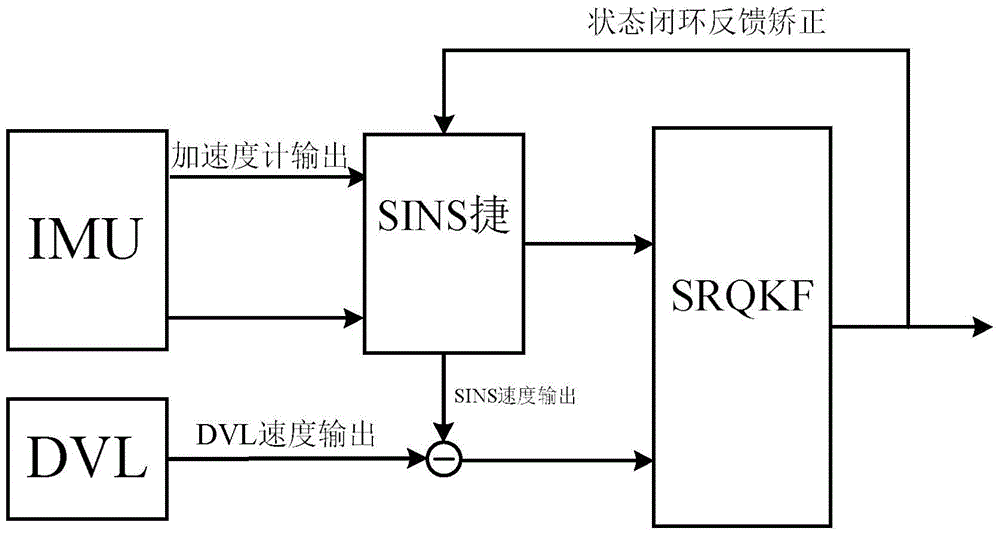
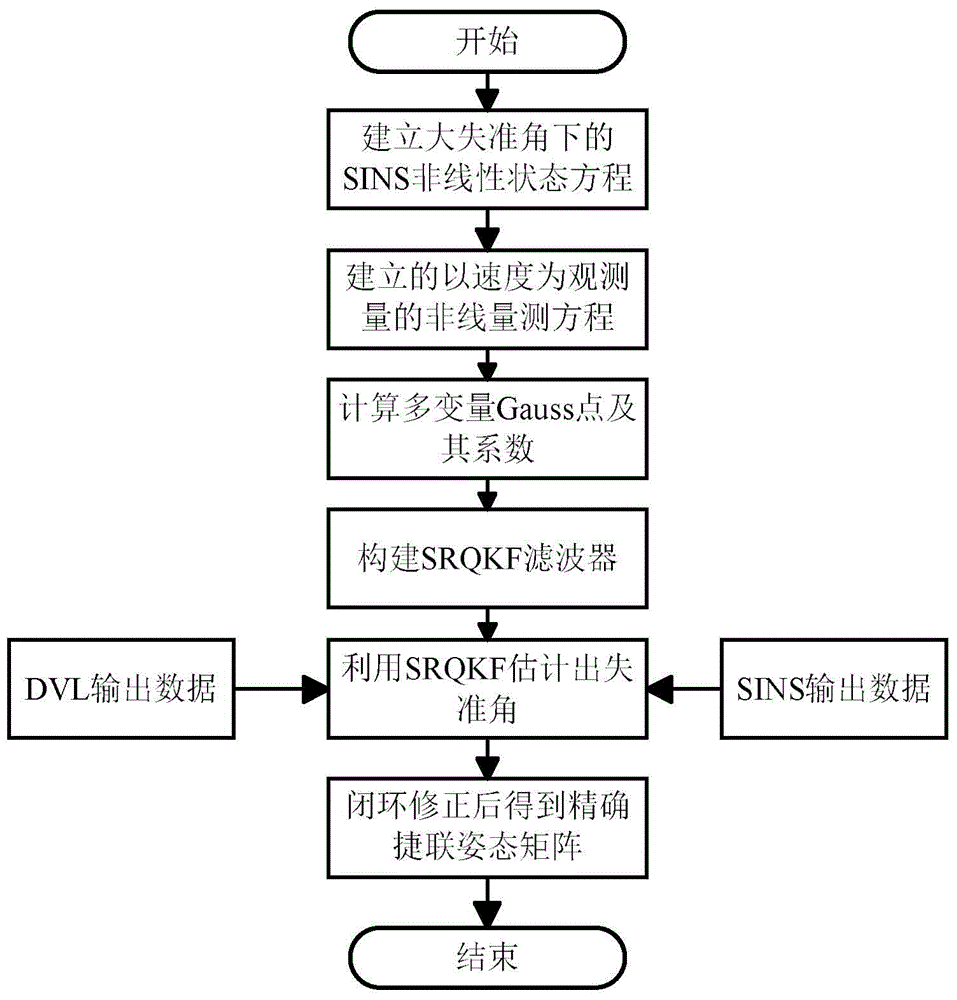
[0113] Such as figure 1 with figure 2 Shown is the system scheme diagram and alignment principle diagram of the present invention.
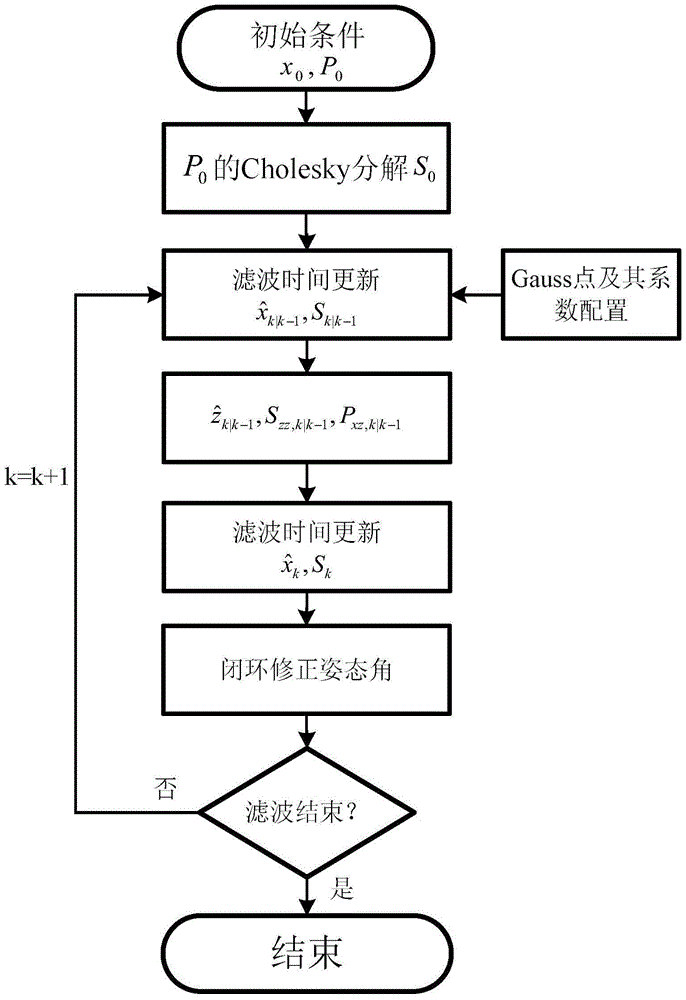
[0114]The SINS strapdown settlement module collects the gyroscope output value and the accelerometer output value output by the inertial measurement unit (IMU) module for strapdown calculation, and obtains attitude angle, attitude matrix, speed, position and other information; DVL equipment works underwater, Output the speed information of the carrier; the information output by SINS and DVL is input to the SRQKF filter at the same time, and the information is filtered. The filtering process is as follows:
[0115] 1. According to the characteristics of SINS / DVL under the condition of large misalignment angle underwater, select a 10-bit state vector:
[0116]
[0117] The nonlinear state filter equation is established:
[0118] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More