

Multi-laser AGV avoidance method
A multi-laser and laser technology, applied in two-dimensional position/channel control, instruments, control/adjustment systems, etc., can solve problems such as multi-vehicles encountering each other and getting stuck, and multi-vehicles waiting for each other, so as to improve operating efficiency and ensure Effects on Reliability and Stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The specific implementation of the present invention will be described in further detail below by describing the embodiments with reference to the accompanying drawings, so as to help those skilled in the art have a more complete, accurate and in-depth understanding of the inventive concepts and technical solutions of the present invention.
[0046] 1. The technical scheme of the avoidance method of the multi-laser AGV of the present invention:
[0047] In order to overcome the defects of the prior art and realize the purpose of the invention to solve the problem of multi-vehicles encountering each other on multi-arterial roads or multi-circular roads and getting stuck or multi-vehicles waiting for each other, the technical solution adopted by the present invention is:
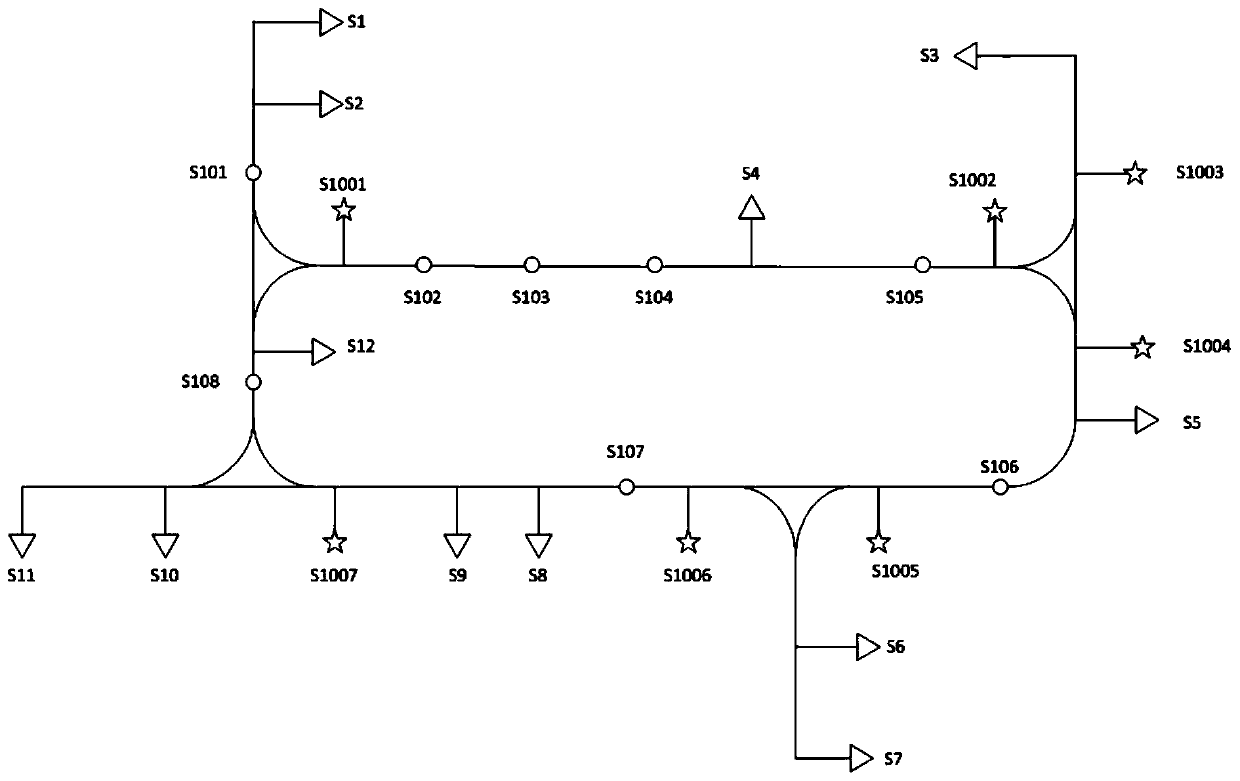
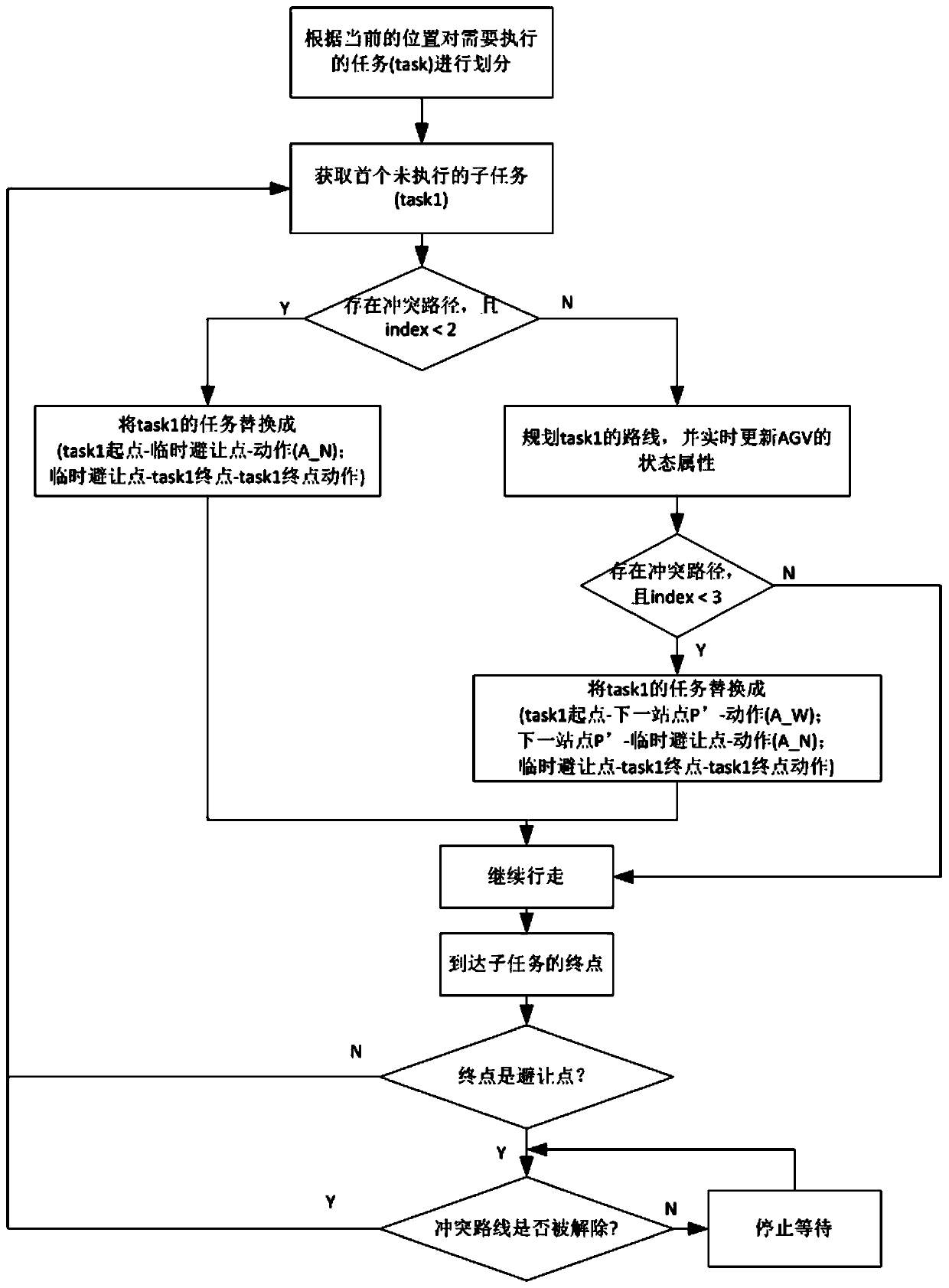
[0048] Such as figure 2 As shown, the avoidance method of the multi-laser AGV of the present invention comprises the following steps:
[0049] 1) Construct the environment model, set the laser AGV sit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More