An active-passive combined transient heart flexible rope-driven lower limb exoskeleton robot and control method
An exoskeleton robot, active and passive technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of human injury and wearing discomfort, achieve high safety, comfortable wearing and walking, and reduce damage.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The embodiments of the present invention are described in detail below. This embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following implementation example.
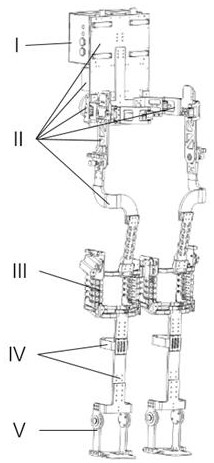
[0033] First introduce the main structure of the present invention. The present invention includes: control box, waist mechanism, knee joint mechanism, calf part and ankle joint mechanism.
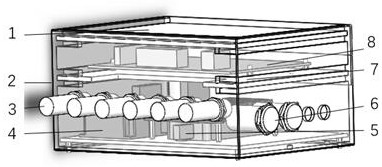
[0034] The control system of the present invention is integrated in the control box. In order to reduce the volume, the control box is designed as a drawer-type two-layer structure. The motor driver, WiFi module and adapter board are fixed on the lower layer, and the control board is installed on the upper layer. In order to facilitate installation and disassembly, the connection between the control box and the outside is conn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More