

Cluster robot scheduling method, device, system and equipment and computer readable storage medium
A scheduling method and robot technology, applied in the field of robotics, can solve the problems of increasing the invalid driving distance of the robot, increasing operating costs, hardware damage, etc., and achieving the effect of saving task execution time, improving overall health, high timeliness and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
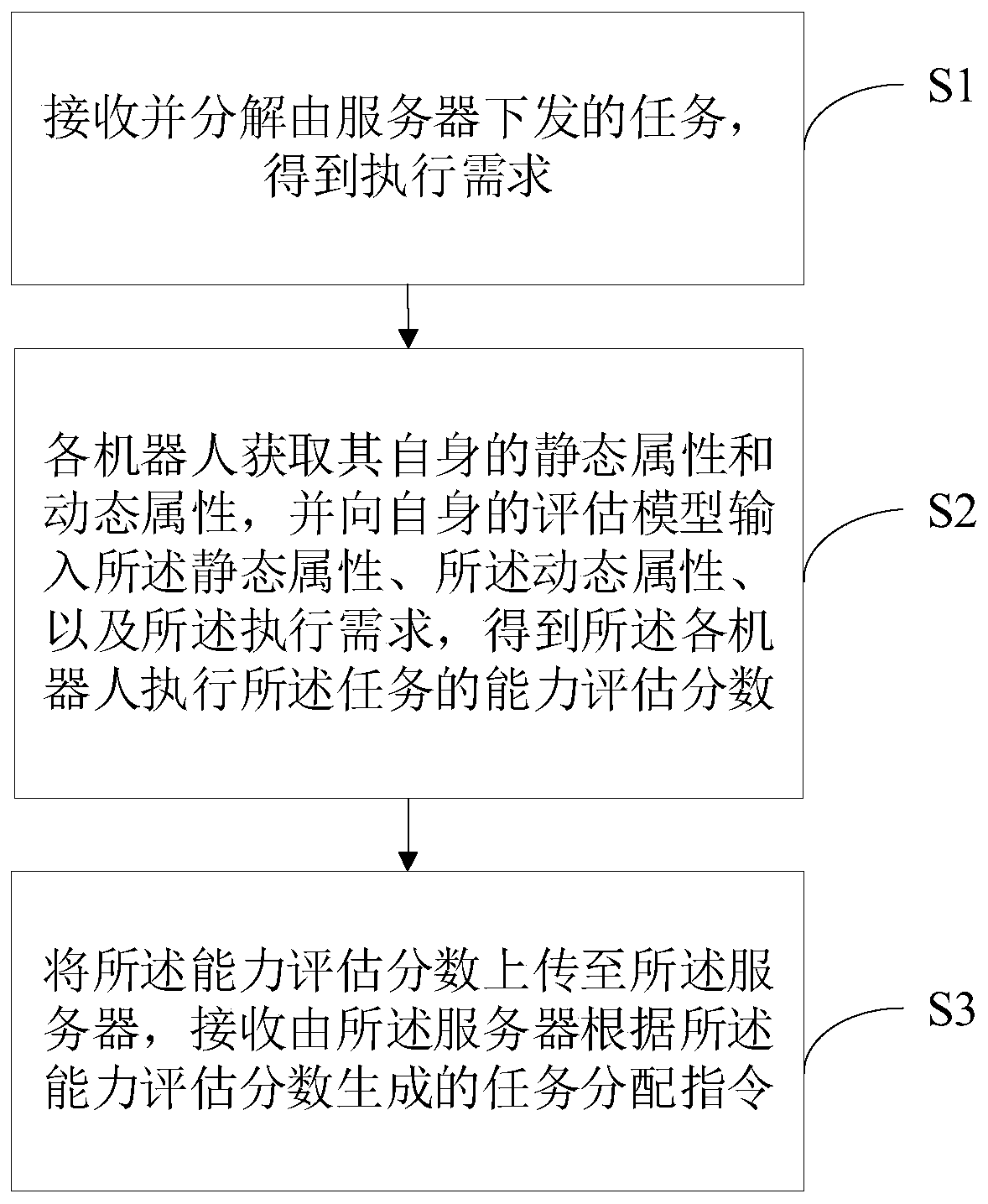
[0047] Such as figure 1 Shown is the first flow chart of the swarm robot scheduling method provided by the embodiment of the present invention. This embodiment proposes a cluster robot scheduling method, the method comprising:
[0048] S1. Receive and decompose the tasks issued by the server to obtain execution requirements;
[0049] S2. Each robot obtains its own static attributes and dynamic attributes, and inputs the static attributes, the dynamic attributes, and the execution requirements into its own evaluation model, and obtains the evaluation scores of the ability of each robot to perform the task ;
[0050] S3. Upload the ability evaluation score to the server, and receive a task allocation instruction generated by the server according to the ability evaluation score.
[0051] In this embodiment, firstly, tasks delivered by the server are received and decomposed to obtain execution requirements. Wherein, the server includes a central control system of the robot, or...
Embodiment 2
[0071] Figure 4 Shown is a structural block diagram of the swarm robot scheduling device provided by the embodiment of the present invention. The present invention also proposes a cluster robot scheduling device, which includes:
[0072] A task decomposition unit 10, configured to receive and decompose tasks issued by the server to obtain execution requirements;
[0073] The task scoring unit 20 is used to obtain the static attributes and dynamic attributes of each robot itself, and input the static attributes, the dynamic attributes, and the execution requirements to its own evaluation model, and obtain the tasks performed by each robot. ability assessment scores;
[0074] The task receiving unit 30 is configured to upload the ability evaluation score to the server, and receive a task allocation instruction generated by the server according to the ability evaluation score.
[0075] It should be noted that the above-mentioned device embodiment and method embodiment belong ...
Embodiment 3
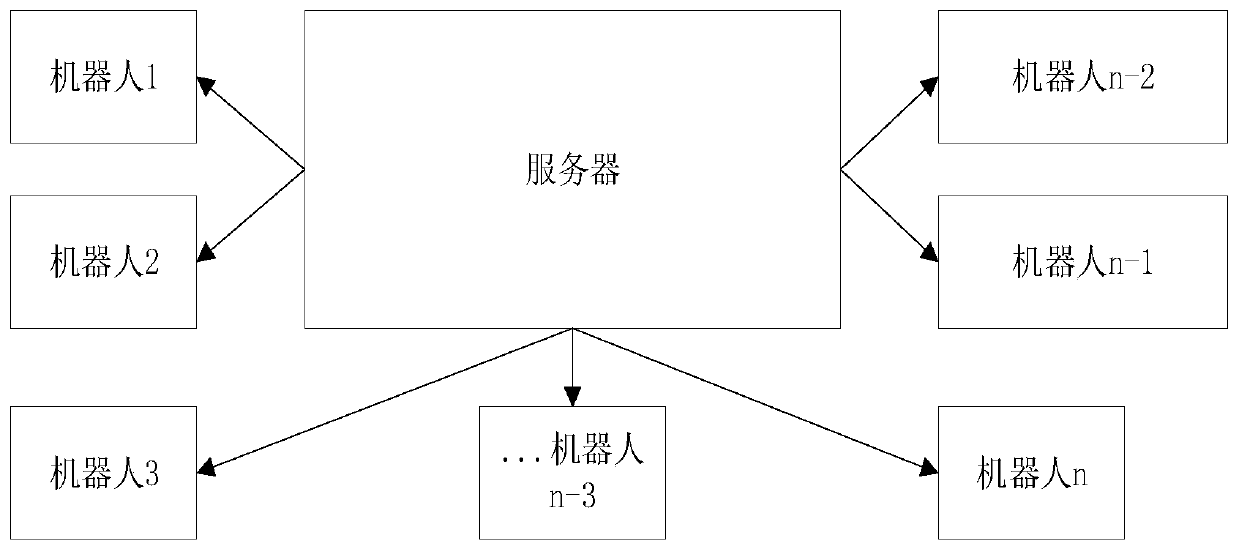
[0078] Figure 5 Shown is the architecture diagram of the swarm robot scheduling system provided by the embodiment of the present invention. The present invention also proposes a cluster robot scheduling system, which includes:
[0079] The robot 40 is used to receive and decompose the tasks issued by the robot central control server 50, obtain execution requirements, and obtain its own static attributes and dynamic attributes, and input the static attributes and the dynamic attributes to its own evaluation model. Attributes, and the execution requirements, to obtain the assessment score of the ability to perform the task itself;
[0080] The robot central control server 50 is configured to receive the ability assessment score uploaded by the robot 40, generate and issue task allocation instructions according to the ability assessment score.
[0081] It should be noted that the above-mentioned system embodiment and method embodiment belong to the same concept, and its specif...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More