

Three-dimensional imaging device and method for dynamic and fine detection of underwater small targets
A fine detection and three-dimensional imaging technology, which is applied in the direction of measuring devices, optical devices, image analysis, etc., can solve the problems of inconvenient measurement of the spatial scale characteristics of the target, the inability to accurately obtain three-dimensional information, and the difficulty in ensuring the detection accuracy, etc., to improve the three-dimensional Imaging efficiency, improving point cloud imaging quality, and realizing the effect of detection work
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
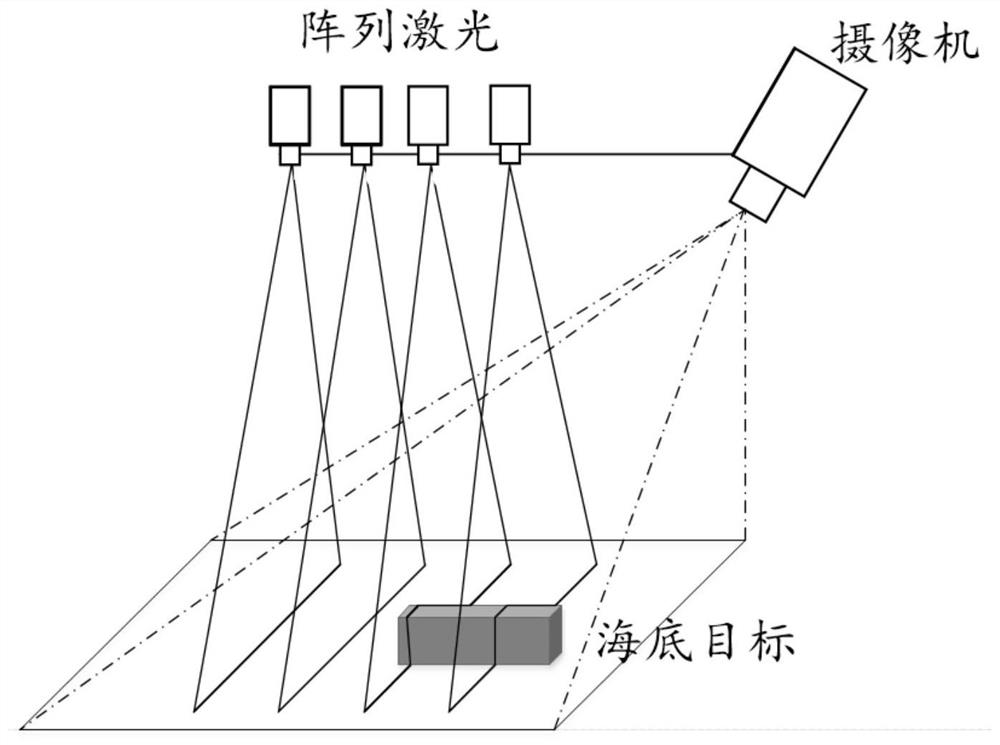
[0070] The platform 3 is installed on the lower part of the underwater robot 8, the laser emitting module and the underwater camera 1 are installed on the platform 3 downwards, the underwater camera 1 is connected to the processing unit 5, and the processing unit 5 is installed in a suitable position without limitation , the laser emitting module is an array laser emitting unit 2, and the underwater cameras 1 are two, respectively installed on both sides of the array laser emitting unit 2, and the two underwater cameras are installed obliquely in the direction of the array laser emitting unit 2.
[0071] The laser is installed vertically downward, and the camera is installed obliquely downward, which can produce a three-dimensional measurement effect. In order to solve the detection error caused by the abnormality of the laser line on the surface of the target object (missing, interlaced, overlapping, etc.), an underwater camera is arranged symmetrically on both sides of the ar...
Embodiment 2
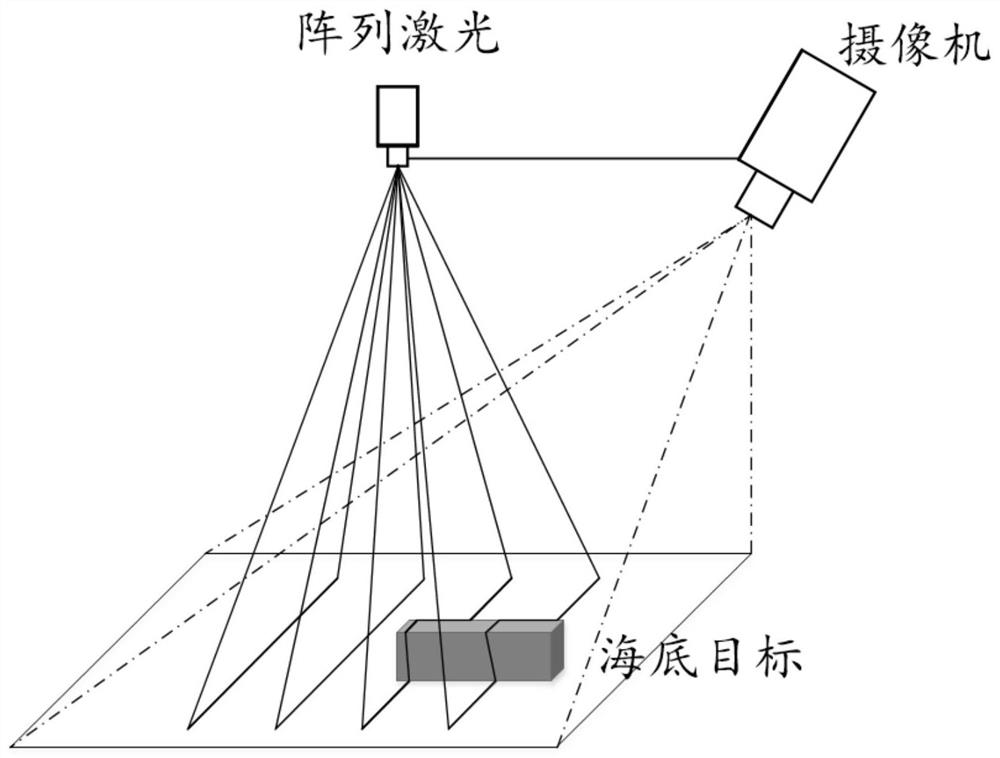
[0076] The arrangement of the lasers of the array laser emitting unit is as follows: a plurality of lasers are arranged at the same position on the same vertical plane, the lasers are word-line lasers, and each word-line laser is installed at a different angle. like image 3 , the method of this embodiment is adopted when the installation space is required to be compact.
[0077] Other technical characteristics are identical with embodiment 1.
Embodiment 3
[0079] like Figure 28 As shown, it includes a platform, the laser emitting module and the underwater camera are fixedly installed on the platform, and the underwater camera is connected with the processing unit.
[0080] The laser emitting module is a single-line laser, and the laser emitting module, underwater camera and processing unit are all installed on a platform, and the platform is fixedly installed on the output shaft of a stepping motor, and the stepping motor is installed on a bracket.
[0081] Other technical characteristics are identical with embodiment 1.
[0082] The three-dimensional imaging method for dynamic and fine detection of underwater small targets of the present invention specifically includes the following steps:
[0083] Step 1: Hardware calibration, including internal reference calibration of the underwater camera and external reference calibration between the laser and the underwater camera;
[0084] Step 2: When the laser emitting module is a s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More