

12-freedom-degree five-finger mechanical arm
A technology of degrees of freedom and manipulators, applied in the direction of manipulators, manufacturing tools, chucks, etc., can solve problems such as large size, complex manipulator structure, and high cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] Below in conjunction with accompanying drawing and embodiment technical solution of the present invention is described in detail as follows:
[0025] For ease of description, the side of the palm is called the front side, the back side of the hand is called the back side, the side close to the little finger is called the left side, and the side close to the thumb is called the right side.
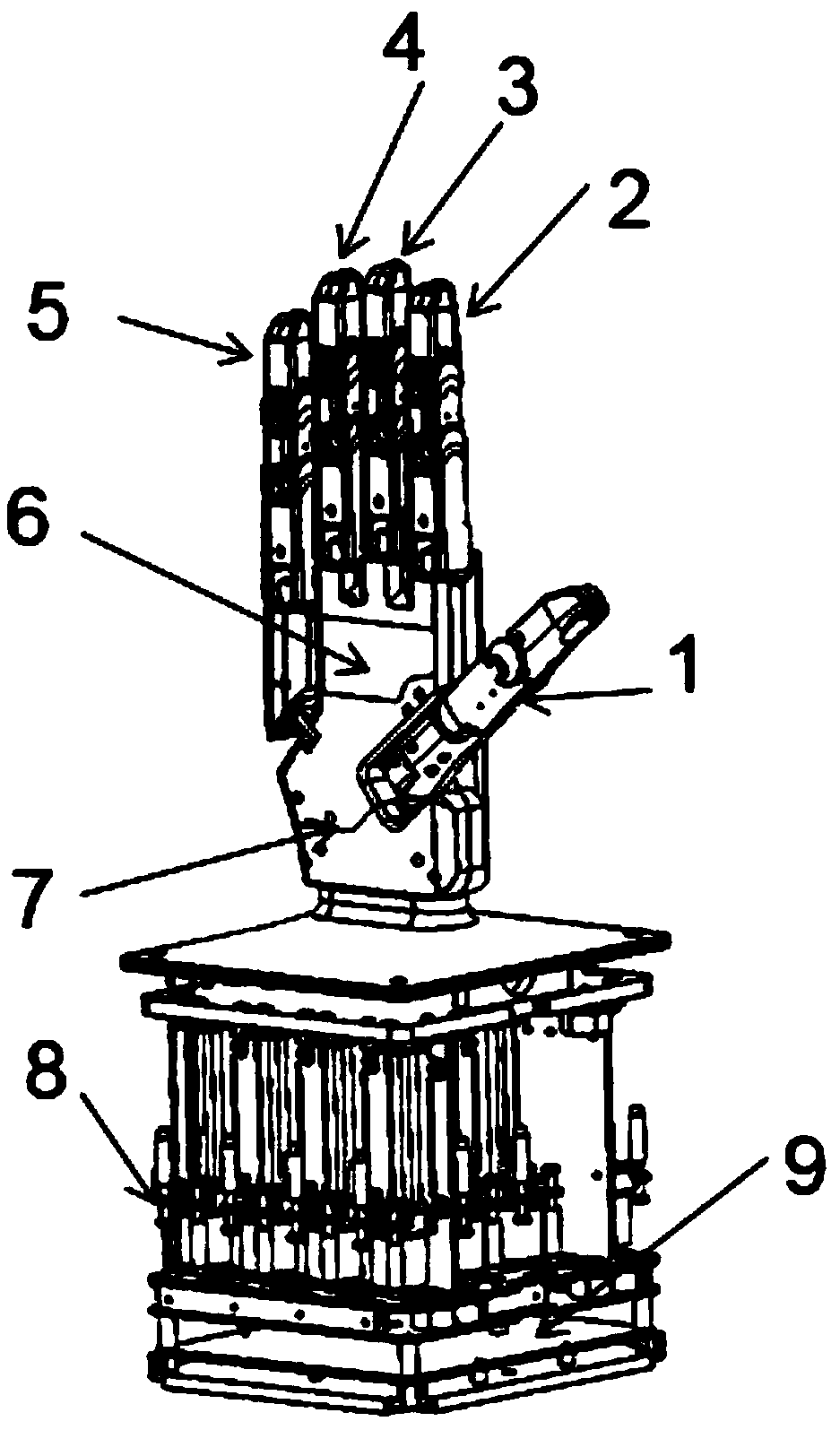
[0026] A 12-degree-of-freedom five-finger manipulator according to an embodiment of the present invention, its overall structure can be found in figure 1 , this manipulator comprises palm 7, palm skin 6 (can increase friction, is convenient to grab object), five fingers ( figure 1 The middle marks 1, 2, 3, 4, 5 respectively correspond to the thumb, index finger, middle finger, ring finger and little finger), the base 9 fixedly connected with the palm 7 (the base 9 has a shell, figure 1 The shell of the base is not shown in the figure), a plurality of tactile sensors and a plurality ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More