

Multi-sensor closed-chain cascade-type hand prosthesis based on myoelectric control
A technology of myoelectric control and sensor closure, applied in prosthesis, medical science, artificial arm, etc., can solve the problems of less freedom of hand prosthesis, inability to realize three-joint bending and extension, poor practicability and functionality, etc. To achieve the effect of enriching the extra functions of the hand, facilitating daily production and life, and enhancing the effect of use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] In order to make the purpose, technical solutions and advantages of the present invention clearer, the technical solutions in the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the present invention. Apparently, the described embodiments are some of the embodiments of the present invention, but not all of them. Based on the embodiments of the invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
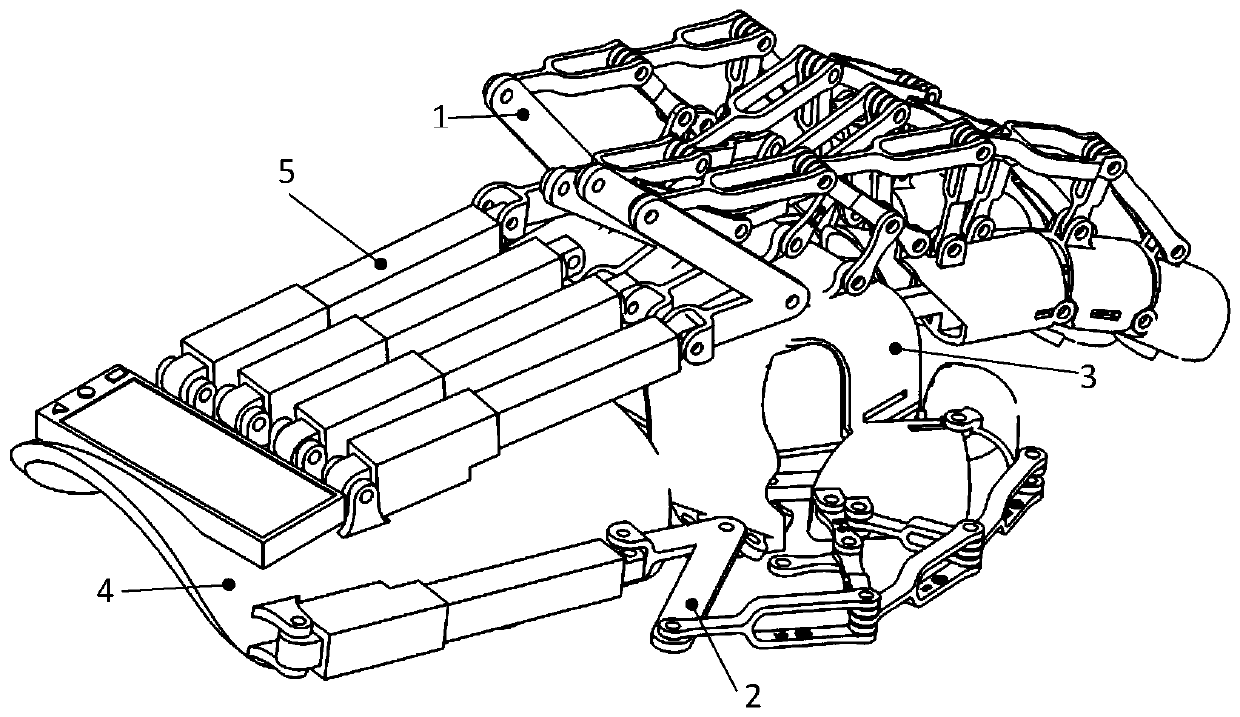
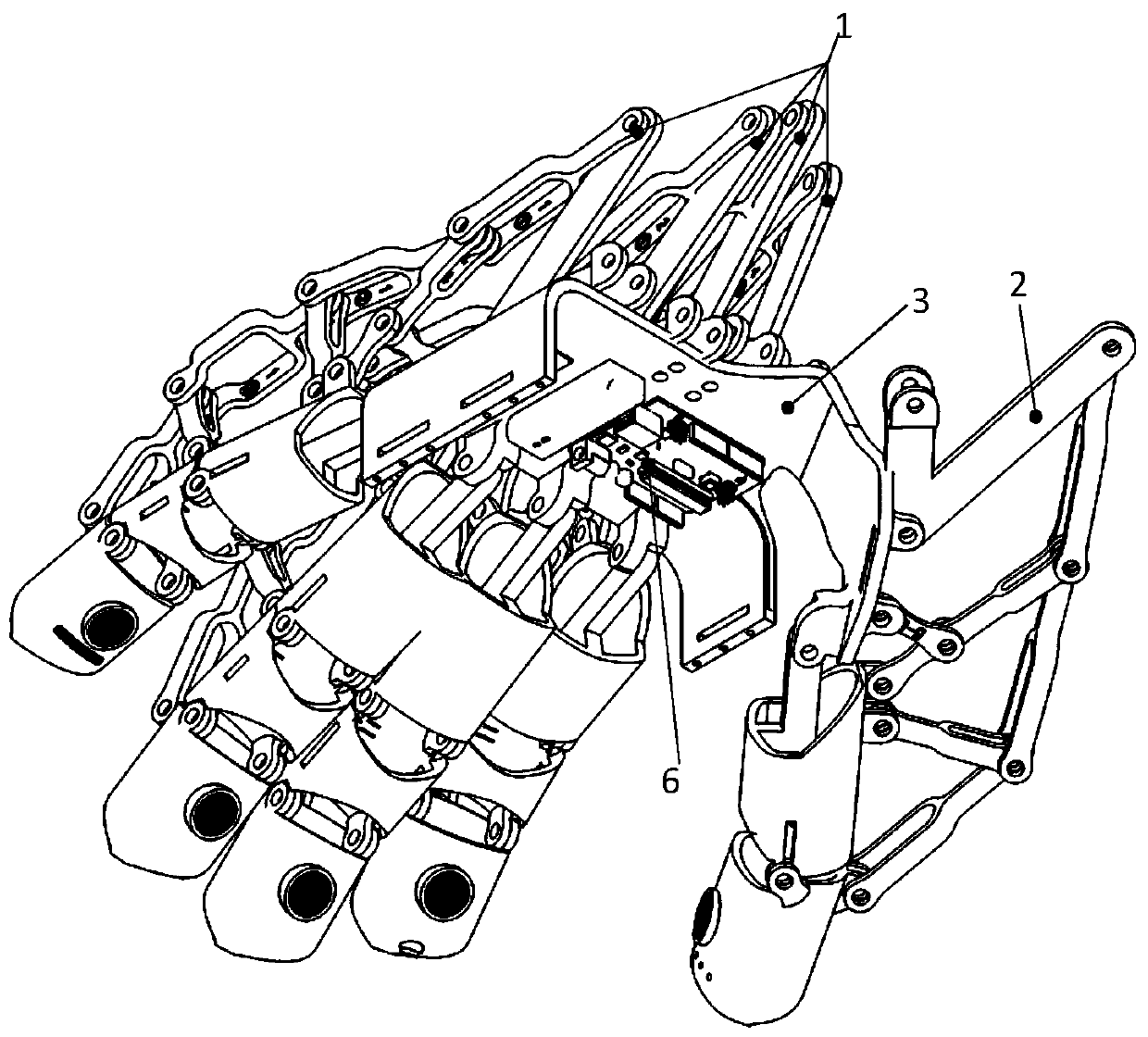
[0040] The invention provides a multi-sensing closed-chain cascade hand prosthesis based on myoelectric control, the specific structure is as follows figure 1 and figure 2 As shown, it includes a four-finger mechanism 1, a thumb mechanism 2, a back plate 3, a motor support plate 4, a motor 5 and an electrical part 6.
[0041] Specifically, the structure and principle of the multi-sensing closed-cha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More