

Self-dropping recovery manipulator for rescue and relief work
A manipulator and self-shedding technology, applied in the field of manipulators, can solve problems such as increased cost, damage, and difficulty in maintenance, achieve uniform and precise control, ensure flexible rotation, and ensure stability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
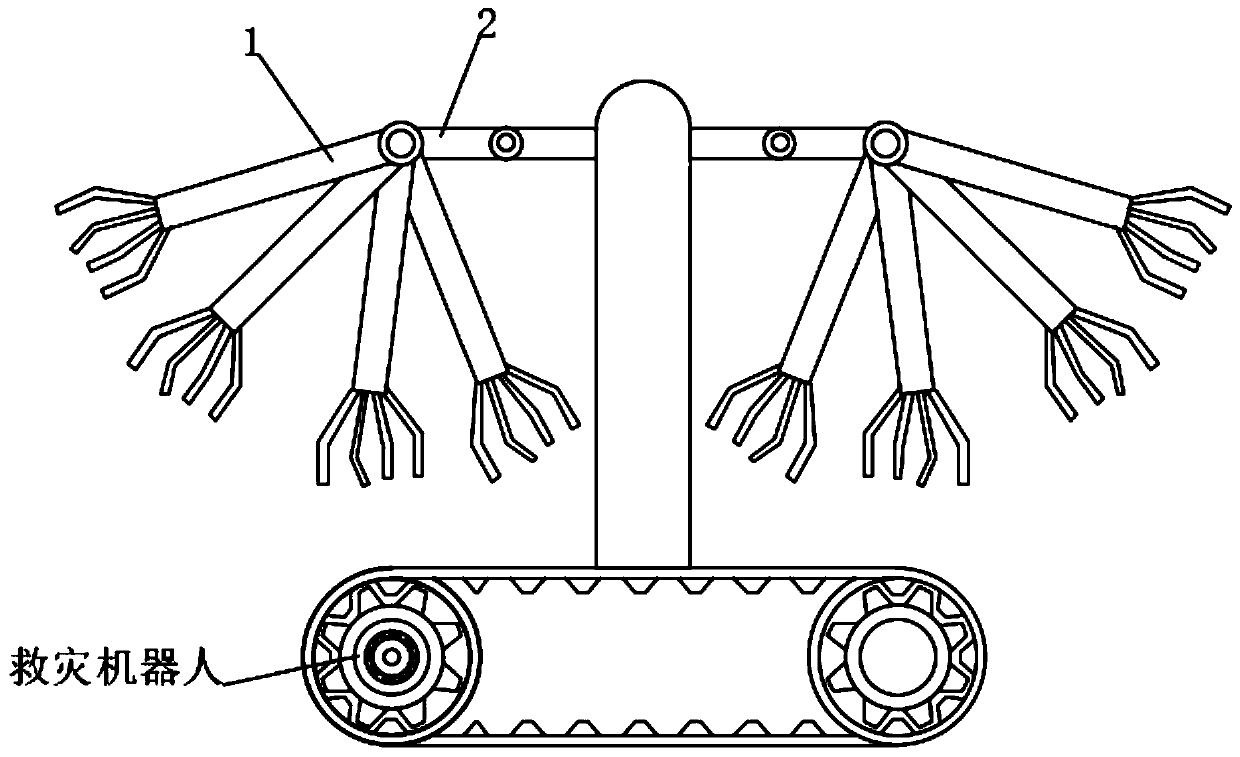
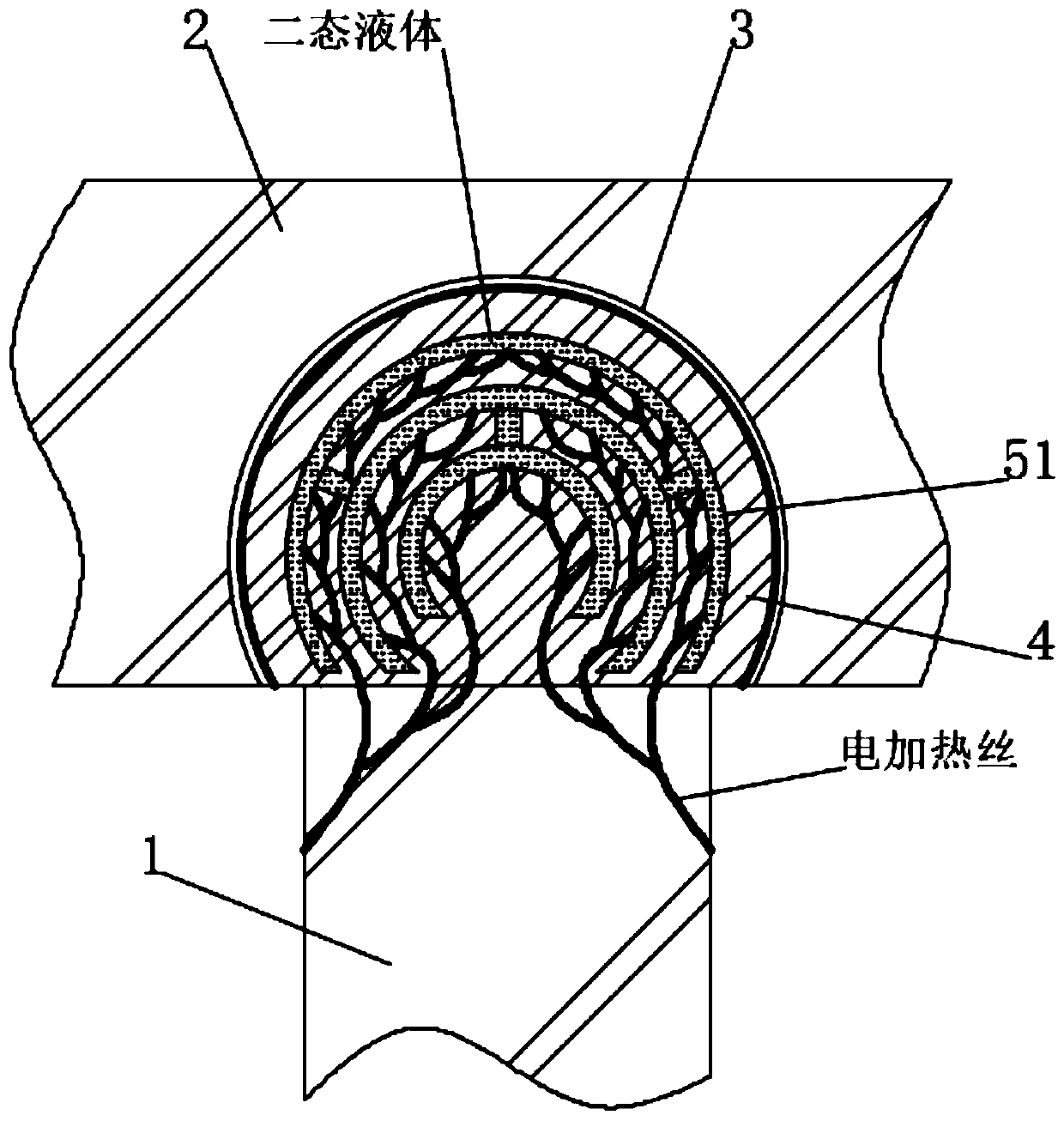
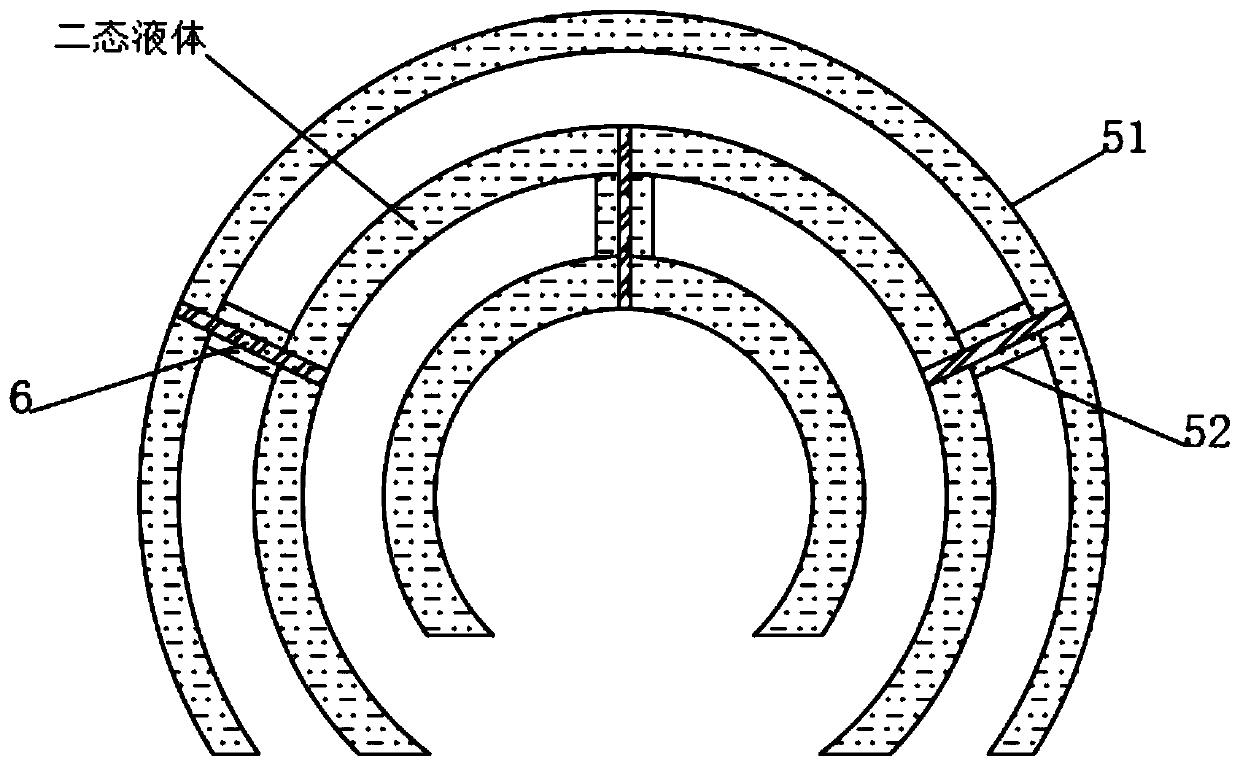
[0040] see Figure 1-2 , a self-falling recovery manipulator for emergency rescue and disaster relief, including a manipulator installed on a disaster relief robot. The end of the arm 2 close to the manipulator 1 is dug with a self-falling ball groove 3, and the self-shaping connector 4 is snapped into the self-falling ball groove 3. The self-shaping connector 4 is embedded with a multi-opening collar, and the manipulator 1 is connected with a A plurality of electric heating wires, the electric heating wires extend into the self-shaping connector 4, the endpoints of the multiple electric heating wires are in contact with the multi-opening collar, and the endpoints of the plurality of electric heating wires are evenly distributed in the multi-opening collar On the surface, the maximum width of the multi-opening collar is smaller than the maximum distance of the notch of the self-falling ball groove 3, so that the multi-opening collar can smoothly enter and exit the self-falling...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More