

Parallel arm weeding robot and weed weeding method
A parallel arm, robot technology, applied in the fields of soil preparation machinery, agricultural machinery and implements, applications, etc., can solve the problems of high labor intensity, serious environmental pollution, and high harmfulness of pesticides.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The scheme will be described below in conjunction with the accompanying drawings and specific implementation methods.
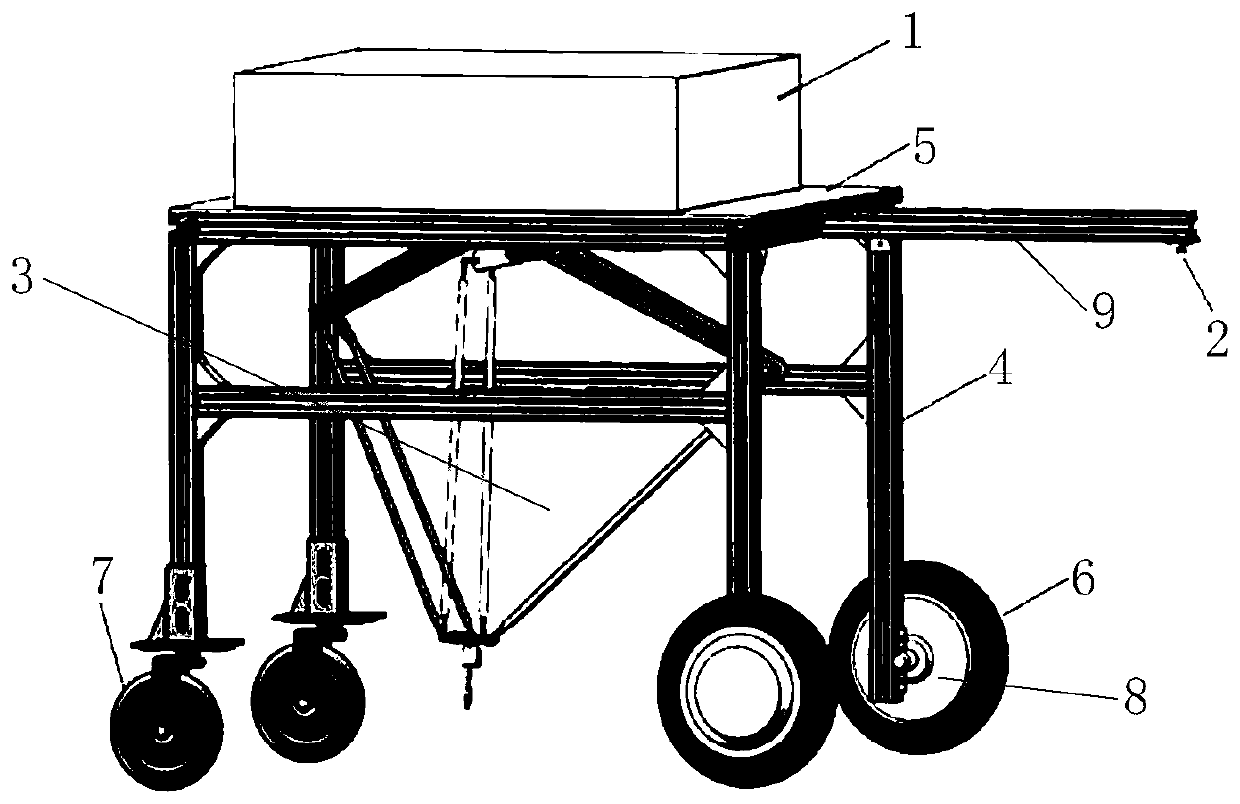
[0025] figure 1 For a schematic structural diagram of a parallel arm weeding robot provided in the embodiment of the present application, see figure 1 The parallel arm weeding robot provided in this embodiment includes a self-propelled drive device, the self-propelled drive device is provided with a weed identification control device 1, and the weed identification control device 1 is fixedly arranged on the self-propelled drive device top of the . A camera 2 is provided at one end of the self-propelled driving device in the traveling direction, and the collection end of the camera 2 is vertically facing the walking ground, and the camera 2 is electrically connected with the weed identification control device 1 . Corresponding to the weed identification control device 1, a Delta arm parallel drive weeding device 3 is fixedly installed at the bottom of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More