

Robot control method, robot and readable storage medium
A control method and robot technology, applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve problems such as failure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] Embodiments of the present application are described in detail below, and examples of the embodiments are shown in the drawings, wherein the same or similar reference numerals denote the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary, are only for explaining the present application, and should not be construed as limiting the present application.
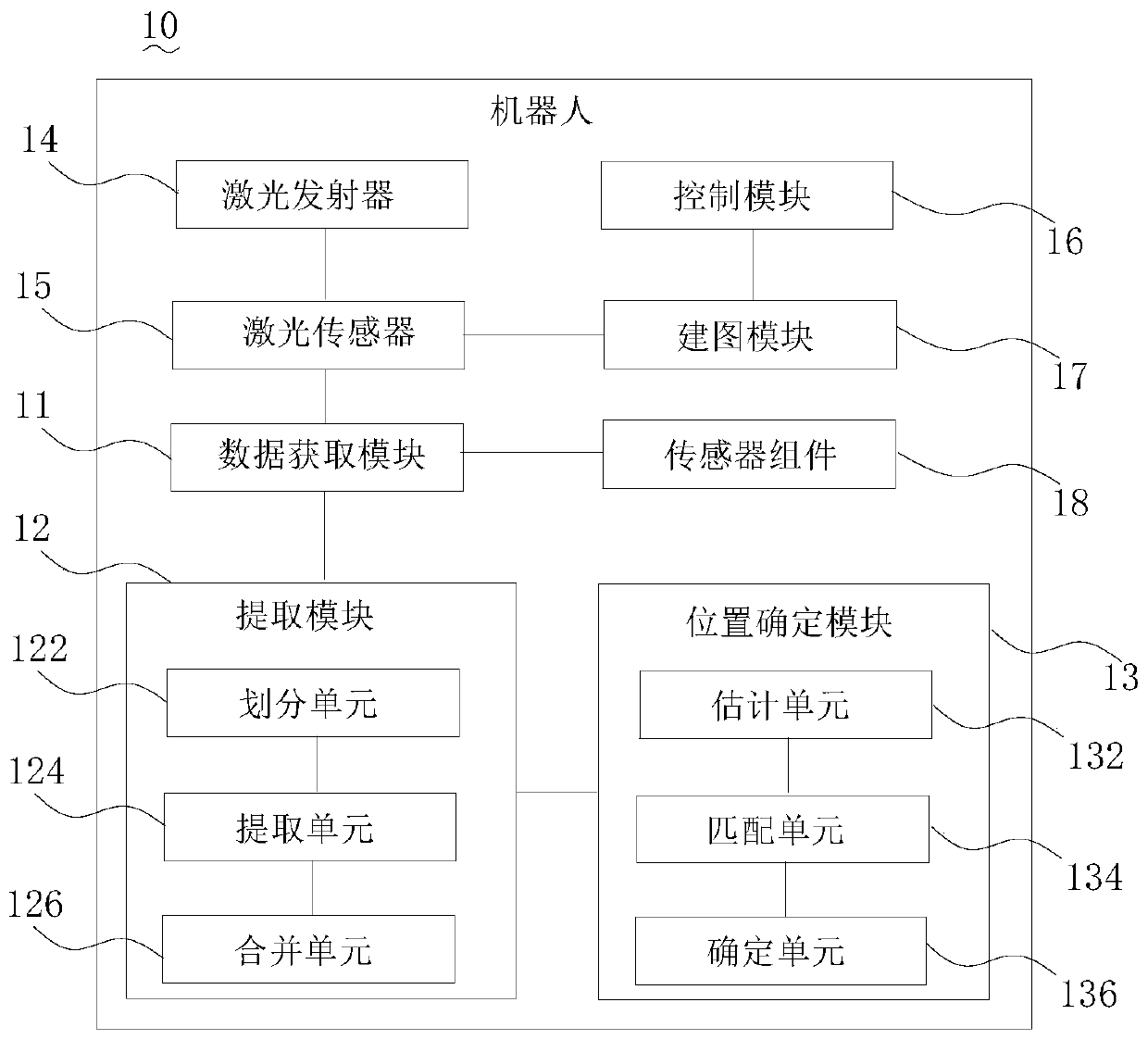
[0044] see figure 1 with figure 2 , the robot control method of the embodiment of the present application is used to control the robot 10 to perform tasks. The robot 10 includes, but is not limited to, mobile robots such as cleaning robots, transport robots, and patrol robots.
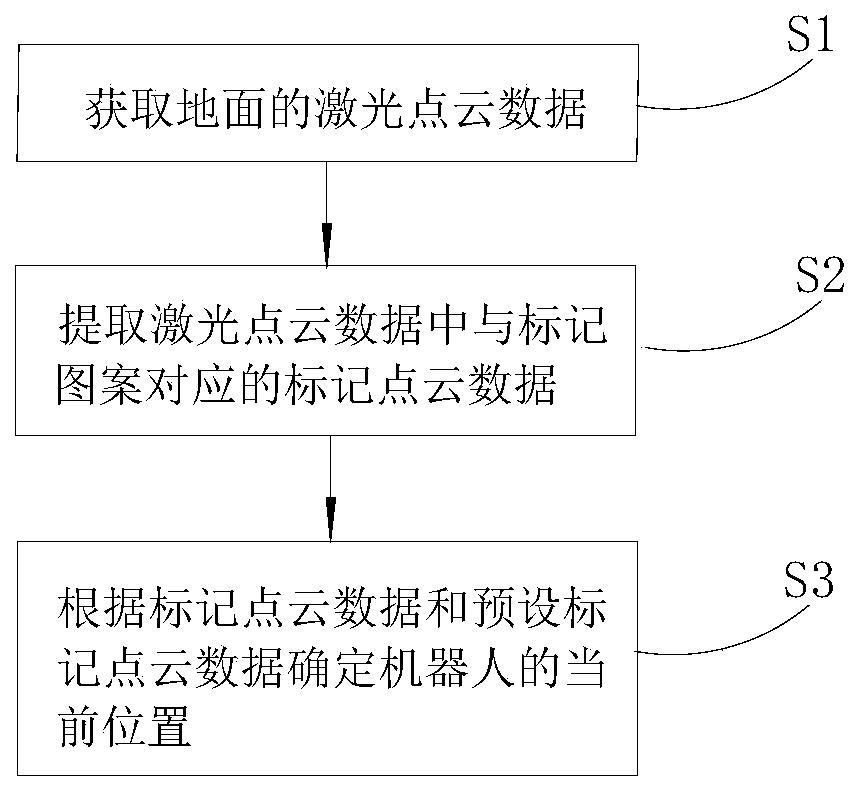
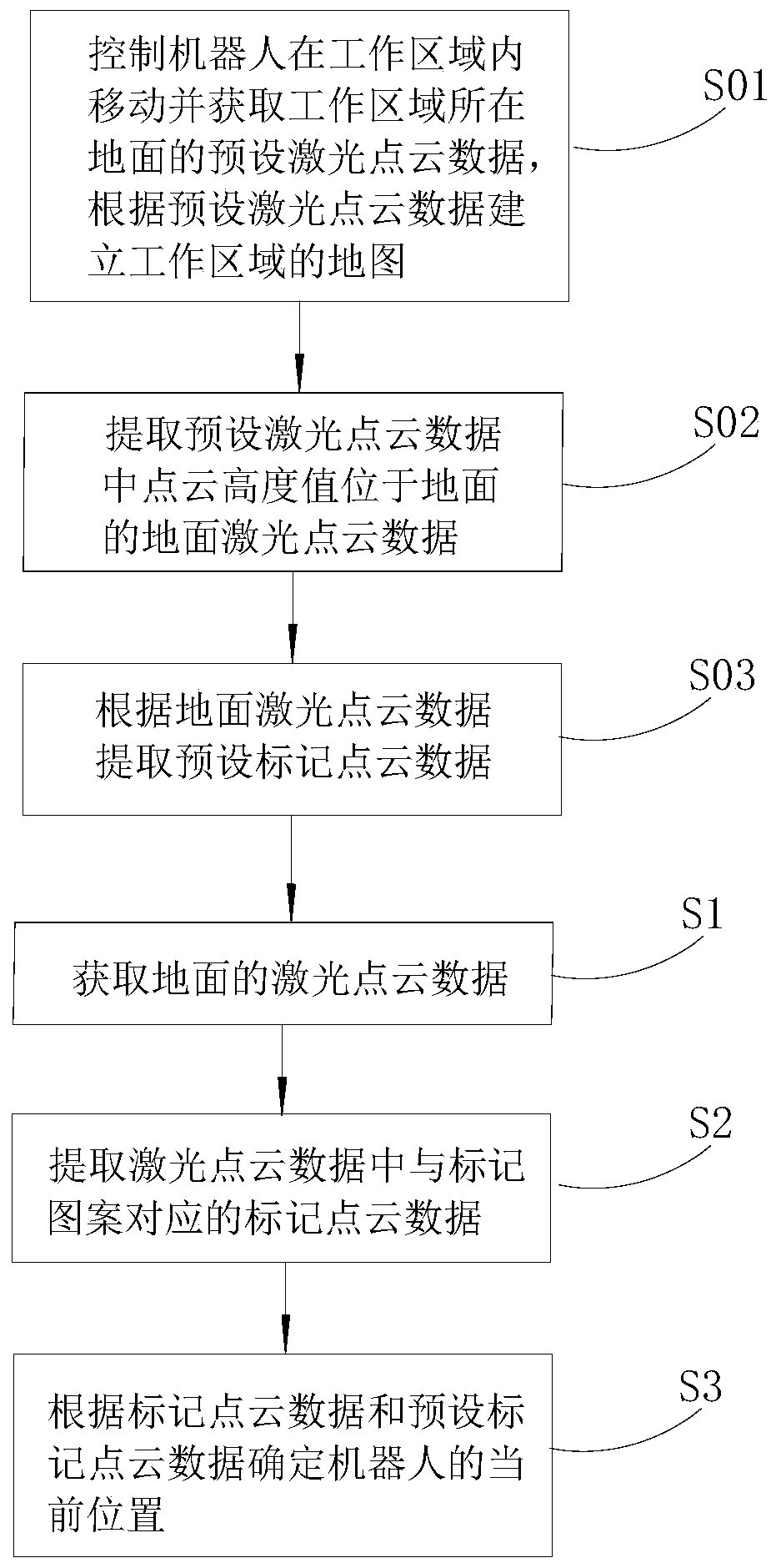
[0045] In some embodiments, the robot control method includes:
[0046] Step S1, obtaining the laser point cloud data of the ground, where a marking pattern is formed on the ground;
[0047] Step S2, extracting the marked point cloud d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More