

Radar and infrared fused unmanned aerial vehicle landing control method and device
A control method and unmanned aerial vehicle technology, applied to ground devices, non-electric variable control, control/regulation systems, etc., can solve problems such as high cost, dangerous bombing, and inability to land, and achieve the effect of low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be further described below in conjunction with the accompanying drawings and specific preferred embodiments, but the protection scope of the present invention is not limited thereby.
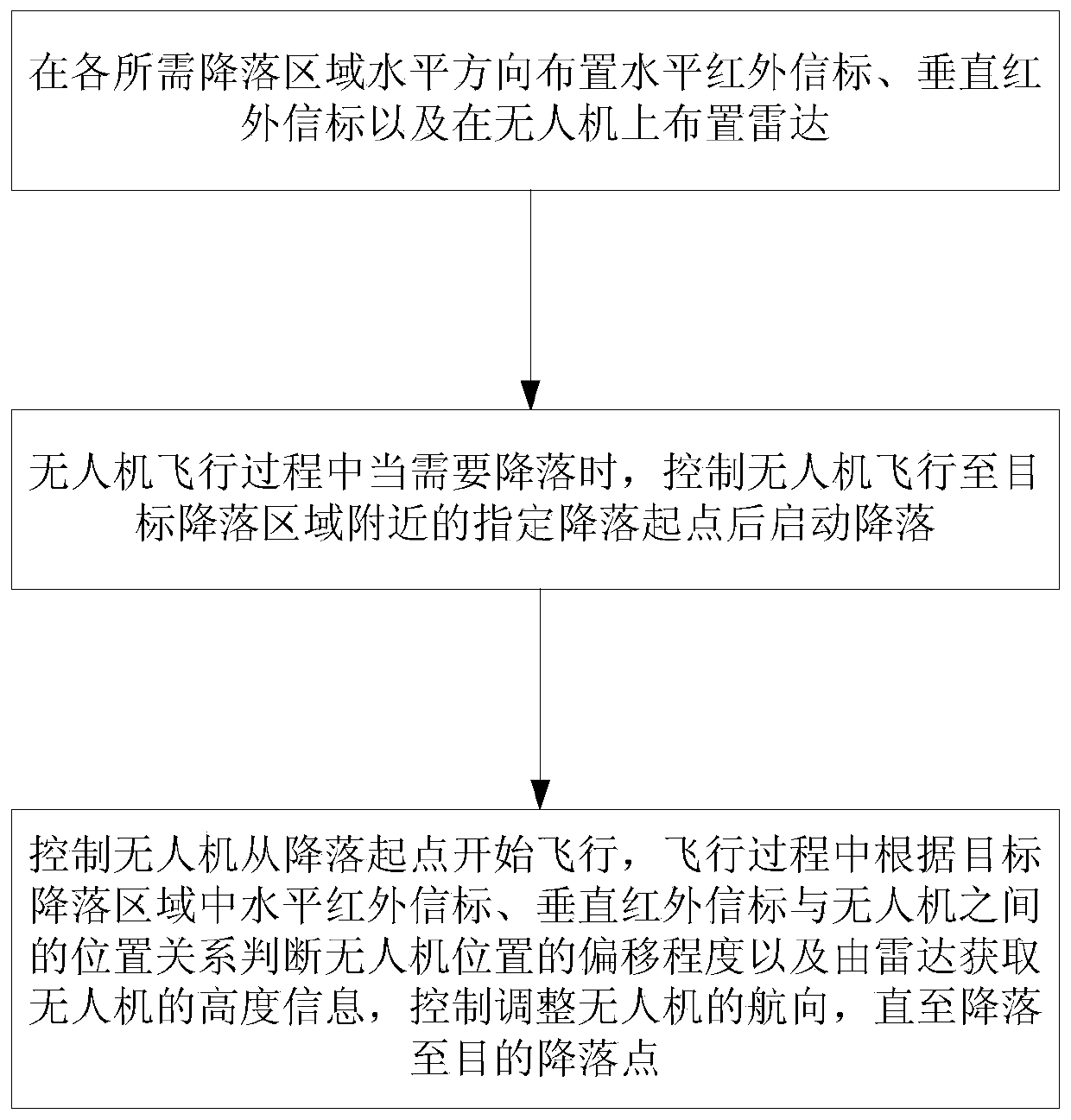
[0041] Such as figure 1 As shown, the steps of the UAV landing control method for radar and infrared fusion in this embodiment include:
[0042] S1. Arrange horizontal infrared beacons with vertical radiation directions in the horizontal direction of each required landing area, arrange vertical infrared beacons with horizontal radiation directions in the vertical direction, and arrange radars with ranging functions on UAVs;
[0043] S2. Landing start: when the UAV needs to land during the flight, control the UAV to fly to the designated landing starting point near the target landing area and then start the landing, and then go to step S3;
[0044] S3. Landing control: control the UAV to start flying from the landing point, and judge the degree of deviation of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More