

Control system and method for cooperative surveying and mapping of unmanned ship and unmanned aerial vehicle
A technology of control system and unmanned boat, which is applied in control/adjustment system, radio wave measurement system, two-dimensional position/channel control, etc. It can solve the problem of short operation time, poor endurance of drones, and difficulty in obtaining surveying and mapping results and other issues to achieve the effects of saving time, improving the efficiency of land surveying and mapping, and improving the overall battery life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0035] The control method realized by the above-mentioned control system for unmanned boat and unmanned aerial vehicle cooperative surveying and mapping specifically includes the following steps:
[0036] i. The unmanned boat carrying the drone arrives at the shoal of the target sea area to navigate around islands and reefs according to the surveying and mapping sonar system. During the navigation, it avoids obstacles according to the set navigation warning value. Record the time, latitude and longitude at this time every 10 seconds and record to store;
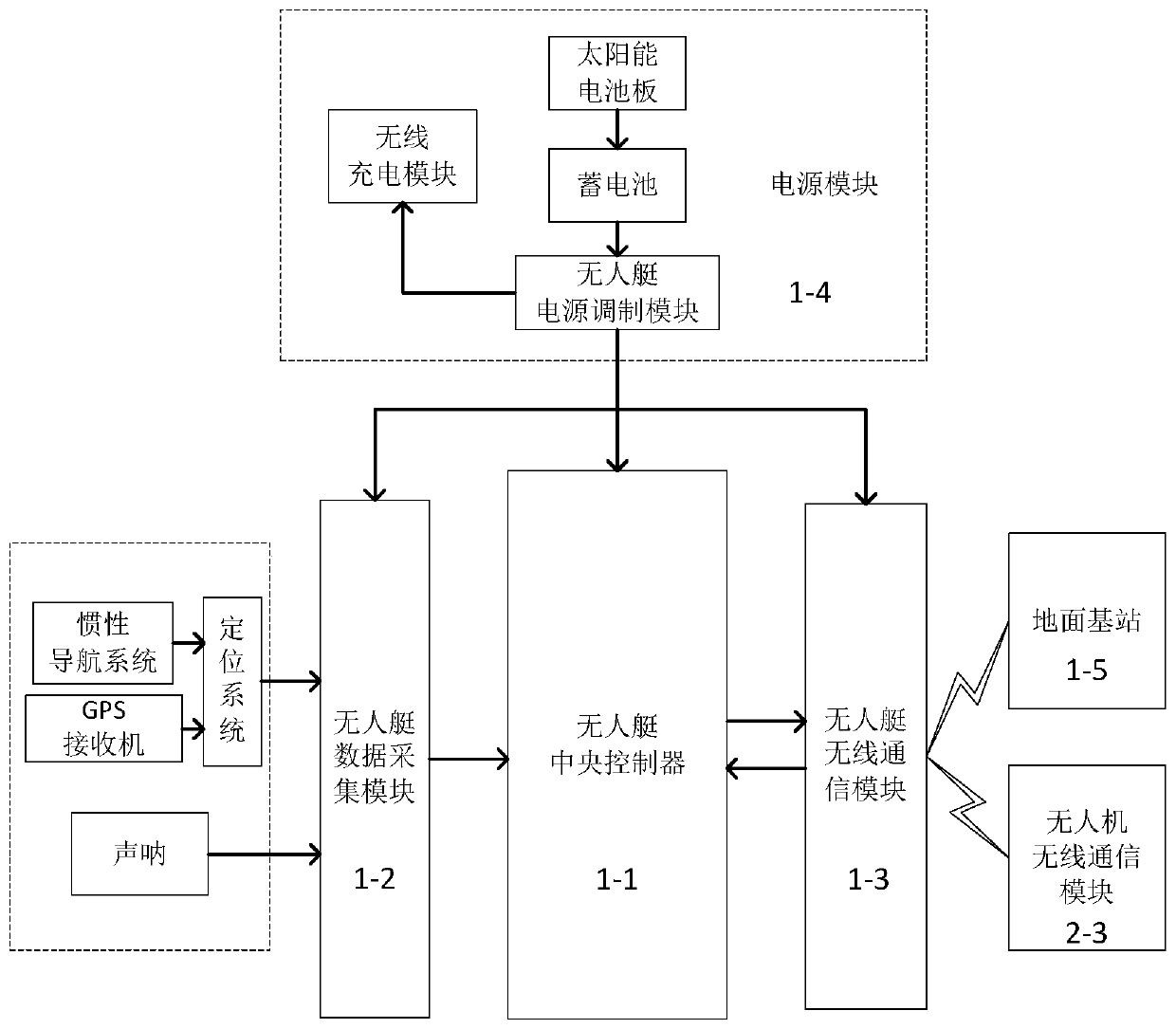
[0037] ii. After the unmanned boat circles the target island and reef for a week, it stops sailing, connects the latitude and longitude points in turn according to the recorded time to form an electronic fence, and sends all the data to the drone through the unmanned boat wireless communication module 1-3;
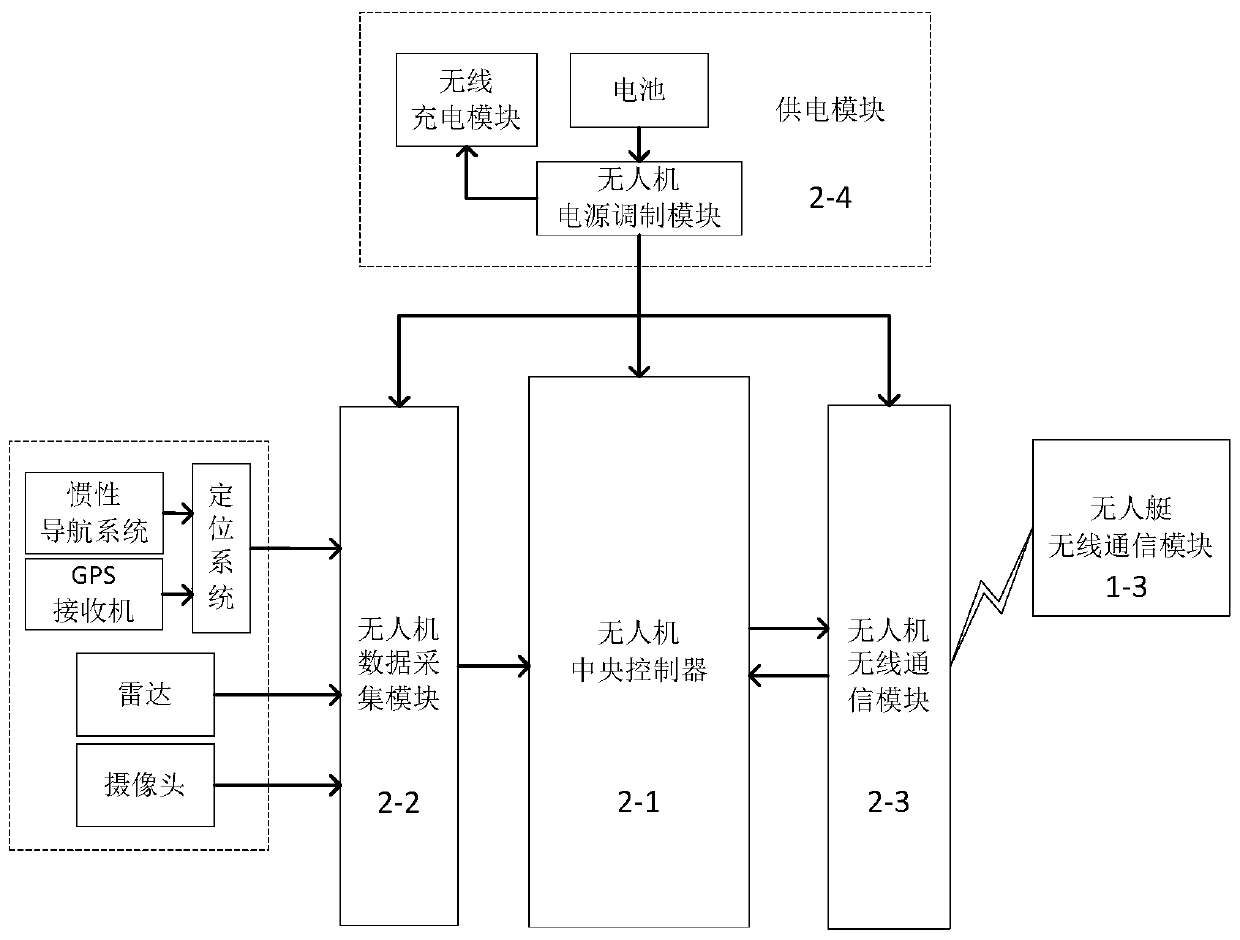
[0038] iii. After the UAV receives all the signals, it sends a successful reception message to the unmanned boat, infor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More