

IMU error online calibration method based on factor graph
A calibration method and factor graph technology, applied in the field of integrated navigation, can solve the problems of adverse effects of high-precision navigation, single IMU device error, and affecting system accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0114] In order to enable those skilled in the art to better understand the technical solutions of the present invention, the present invention will be further described in detail below in conjunction with specific embodiments.
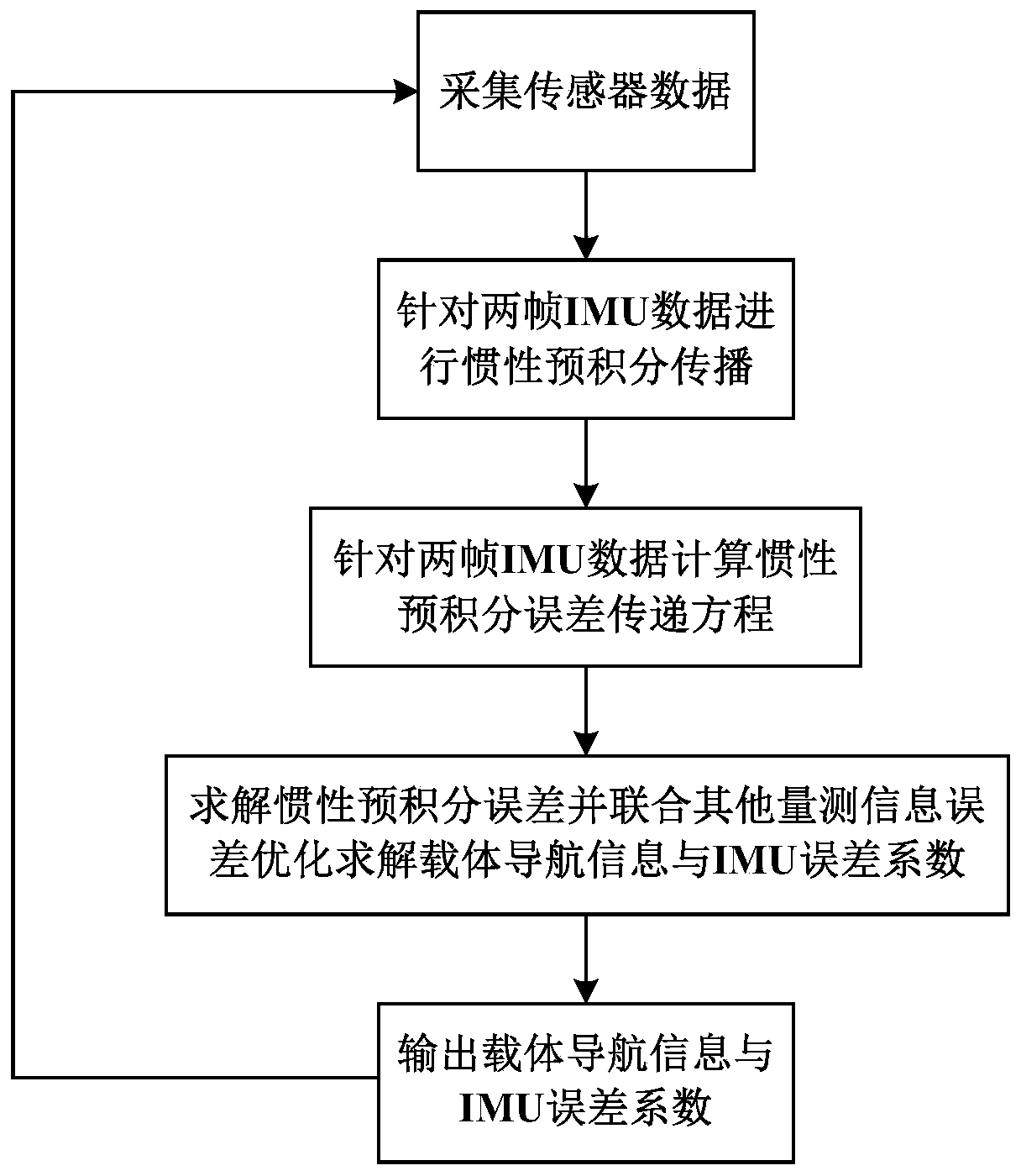
[0115] An embodiment of the present invention provides an IMU (Inertial measurement unit inertial measurement unit) error online calibration method based on a factor graph, the process is as follows figure 1 shown, including:
[0116] Step 1: Acquire the measurements of the accelerometer and gyroscope in the inertial sensor
[0117] Step 2: Accelerometer Measurements and gyroscope measurements Pre-integrate propagation to the IMU.
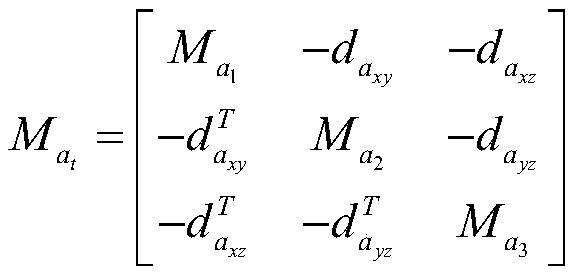
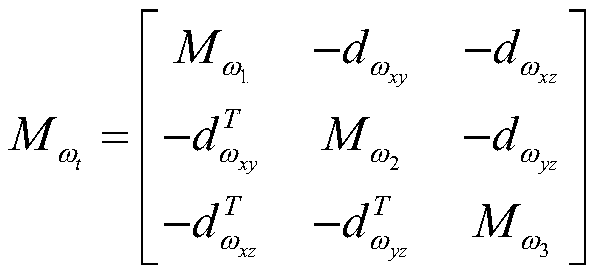
[0118] 1) The error coefficient matrix of the accelerometer and gyroscope is calculated in the following form:
[0119]
[0120]
[0121] Among them, M a1 , M a2 , M a3 Represent the error coefficients of the X, Y, and Z axes of the accelerometer, M ω1 , M ω2 , M ω3 represent the error coefficients of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More