

Vehicle GNSS/INS integrated navigation method based on discrete gray neural network model
A gray neural network and integrated navigation technology, applied in the field of vehicle GNSS/INS integrated navigation based on discrete gray neural network model, can solve the problem of reduced navigation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0076] The technical solution of the present invention will be further introduced below in combination with specific implementation methods and accompanying drawings.
[0077] This specific embodiment discloses a vehicle GNSS / INS integrated navigation method based on a discrete gray neural network model, comprising the following steps:
[0078] S1: According to the angular increment and specific force output by the micro-inertial device, use the inertial navigation value update algorithm to solve the attitude, speed and position of the vehicle;
[0079] S2: Establish a discrete gray scale prediction model based on DGM(1,1);
[0080] S3: Improved multi-layer neural network MLP;
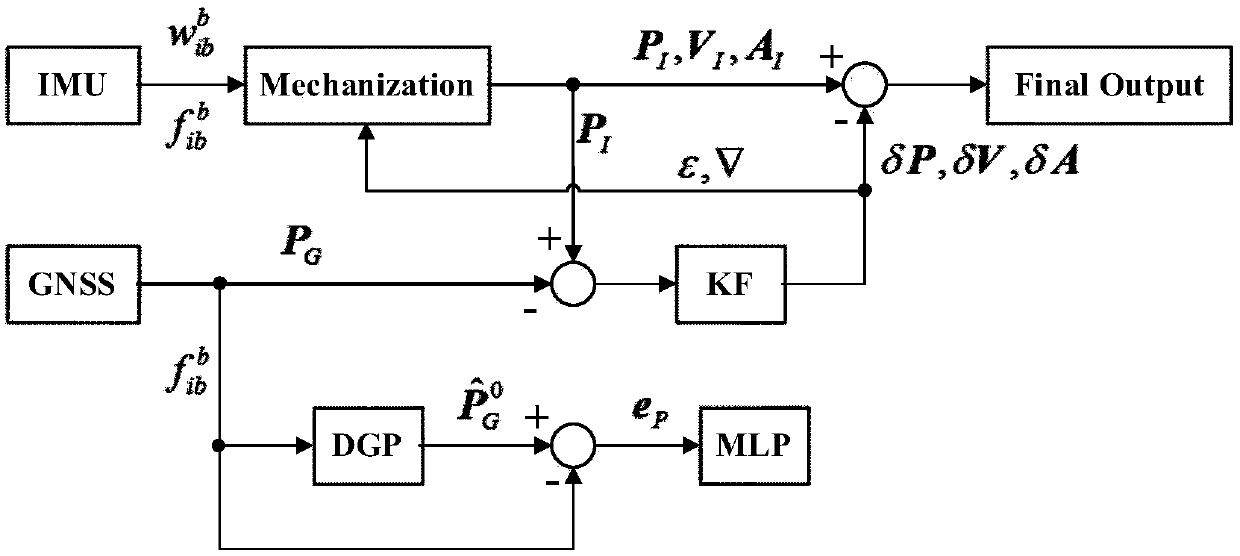
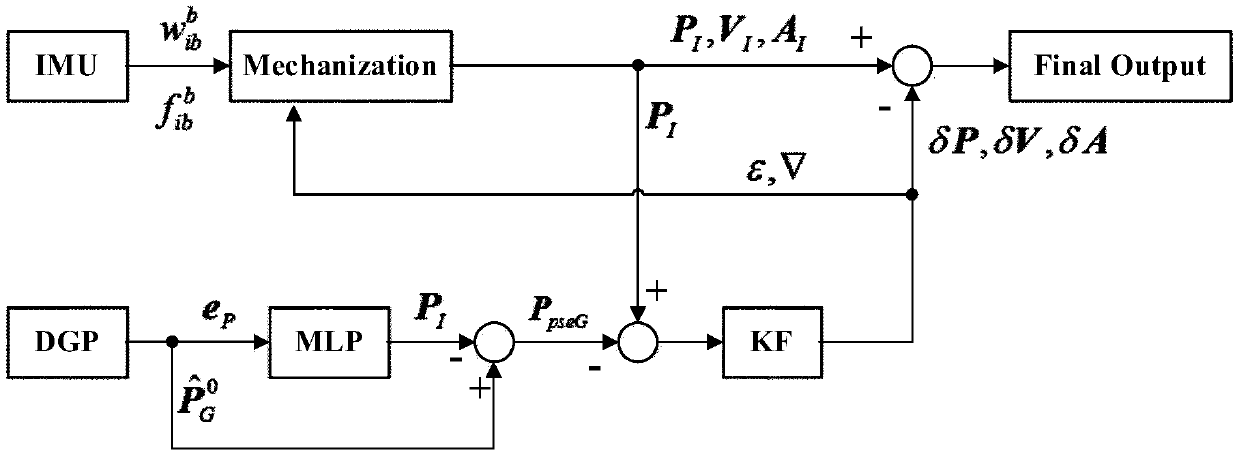
[0081] S4: Design a hybrid intelligent prediction algorithm DGM-MLP based on a discrete gray-scale neural network. When the GNSS signal is valid, use DGM-MLP to train the GNSS position; when the GNSS signal is invalid, use DGM-MLP to train the GNSS position. Prediction, obtain pseudo GNSS position in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More