

Three-dimensional laser radar fast robust SLAM method and device
A technology of three-dimensional laser and laser radar, which is applied in the field of integrated navigation, can solve problems such as matching, error, and horizontal coupling of elevation error, achieve high calculation efficiency, improve the accuracy of pose estimation, and suppress the error of height calculation and horizontal coupling error. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
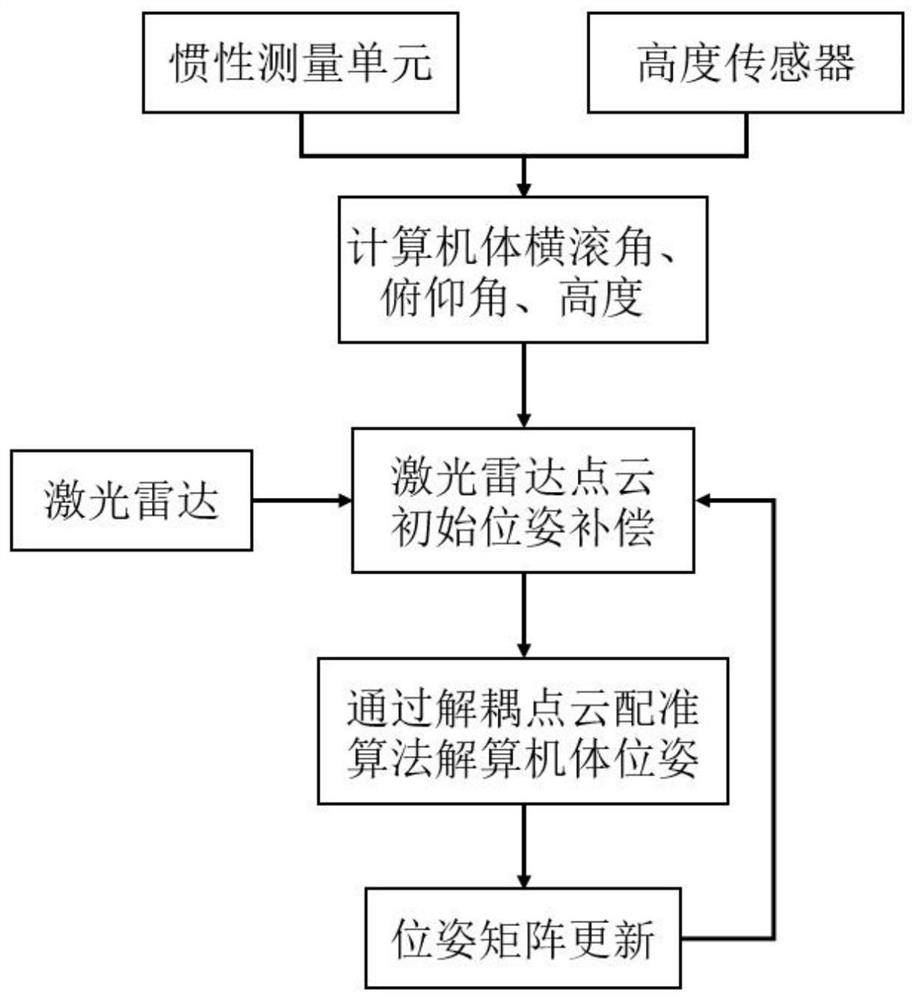
[0074] Such as figure 1 As shown, the present invention provides a fast and robust SLAM method for three-dimensional lidar, comprising the following steps:
[0075] Step 1. Collect inertial sensor and height sensor data, and calculate the roll angle, pitch angle and height of the body coordinate system relative to the global coordinate system at the current moment;
[0076] Step 2. Collect lidar point cloud data and perform pose compensation on the lidar point cloud;
[0077] Step 3. Use the point cloud after pose compensation in step 2 to calculate the decoupled point cloud registration algorithm, and calculate the six-degree-of-freedom pose of the body at the current moment;
[0078] Step 4: Update the pose matrix according to the update conditions of the SLAM framework, and pass the result to step 2.
[0079] Further, step 1 specifically includes:
[0080] Step 11. According to the inertial sensor and altitude sensor data, the pose matrix of the computer system relative ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More