

Hand dysfunction rehabilitation system
A technology for hand function and impairment, which is applied in the field of rehabilitation equipment for hand dysfunction, and can solve the problems of single training function, single function and poor rehabilitation effect of training gloves
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
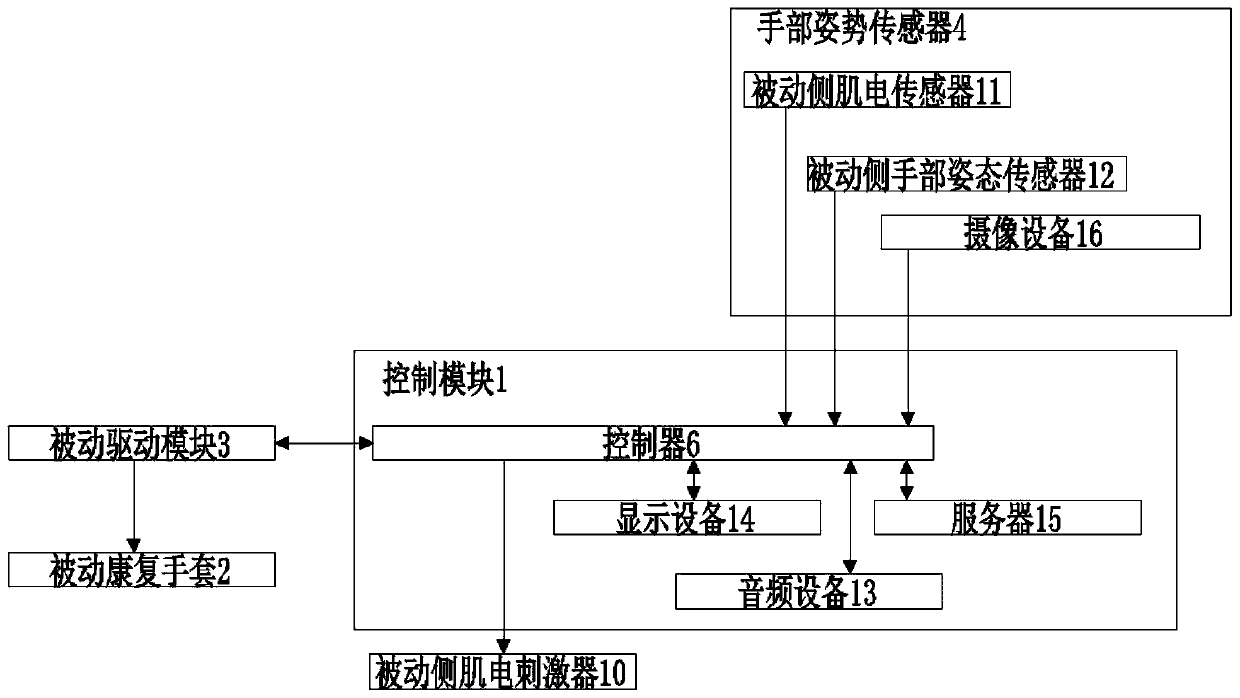
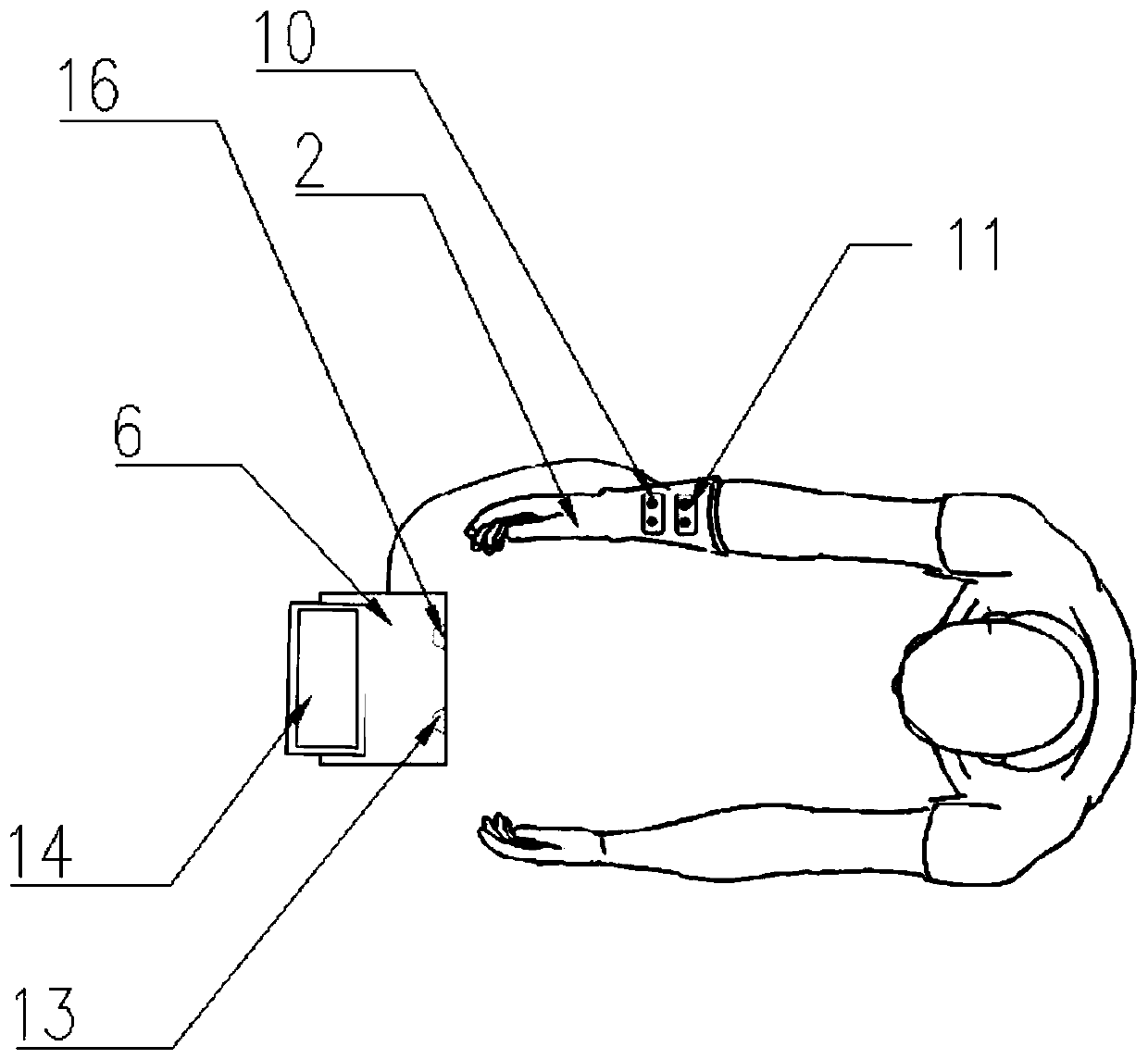
[0029] In a specific embodiment of the present invention, a hand dysfunction rehabilitation system, such as figure 1 with figure 2 As shown, it includes: a control module 1, a passive rehabilitation glove 2, a passive drive module 3, a hand posture sensing module 4 and a power supply; the hand posture sensing module 4 controls the module 1 through wired or wireless mode, and sends hand movement signals To the control module 1; the passive drive module 3 is connected to the passive rehabilitation glove 2, and the control module 1 passively drives the module 3 through wired or wireless mode, and sends the passive drive signal to the passive drive module 3, and the passive drive module 3 drives the passive rehabilitation glove 2 to work; Connect the control module 1 , the hand posture sensing module 4 and the passive drive module 3 to supply power to them; the control module 1 includes a controller 6 .
[0030]In this specific embodiment, the controller 6 can use a computer or ...
Embodiment 2
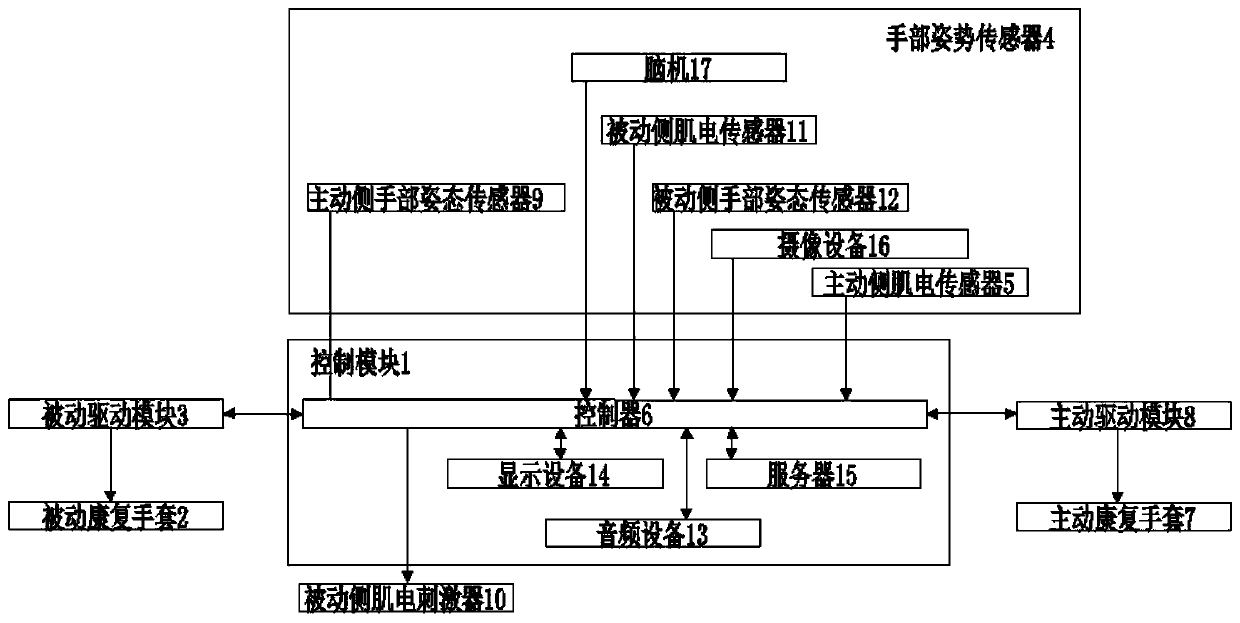
[0043] In a preferred embodiment, a hand dysfunction rehabilitation system, such as image 3 and Figure 4 As shown, different from Embodiment 1, it also includes an active rehabilitation glove 7 and an active driving module 8 , and the hand posture sensing module 4 includes an active side hand posture sensor 9 . The active side hand posture sensor 9 is set on the active rehabilitation glove 7, and the control module 1 actively drives the module 8 through wired or wireless mode, sends an active driving signal to the active driving module 8, and the active driving module 8 drives the active rehabilitation glove 7 to work.
[0044] In this specific embodiment, the active rehabilitation glove 7 can be of the same type as the passive rehabilitation glove 2, and the active side hand posture sensor 9 can be an air pressure sensor, a mechanical joint angle sensor, etc. according to the type of glove. The active movement of the patient's normal hand drives the active rehabilitation g...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More