

Point-based iterative remote sensing image road extraction method
A technology for remote sensing image and road extraction, applied in the field of computer vision, can solve the problem of difficulty in combining graph-level connectivity and pixel-level accuracy at the same time, and achieve the effect of good road and intersection alignment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
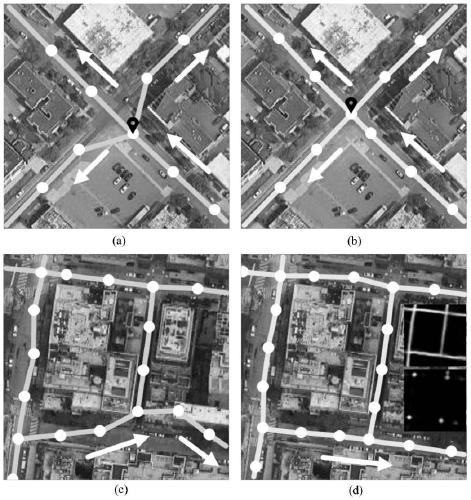
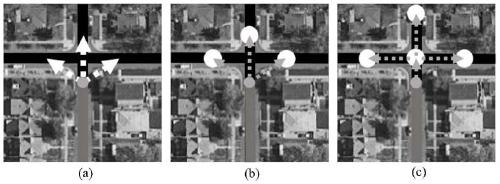
[0023] The iterative exploration framework iteratively constructs a road map by continuously predicting the next action and merging its predictions into the existing road map. The present invention adopts this framework and proposes several schemes to improve the performance of the constructed roadmaps. First, a point-based next-step movement representation is utilized, which is a joint representation of movement angle and distance, so that multiple constraints can be applied during the training phase without multiple supervisions. Second, this paper proposes a variable-step detection technique, which benefits from a point-based representation and can be achieved by simply changing the position of the drop point in the supervision information, which aims to dynamically align the training phase with the road. This paper also utilizes ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More