

Clamping jaw mechanism controlled by servo electric cylinder
A servo electric cylinder and gripper technology, applied in the field of robotics, can solve the problems of falling, deformation of the object to be clamped, and shaking of the object to be clamped, etc., to achieve the effect of improving applicability, improving stability, and avoiding shaking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described in detail below in conjunction with the drawings.
[0026] The same parts are indicated by the same reference numerals. It should be noted that the words "front", "rear", "left", "right", "upper" and "lower" used in the following description refer to the directions in the drawings, and the words "bottom" and "top" "Face", "inner" and "outer" respectively refer to directions toward or away from the geometric center of a particular component.
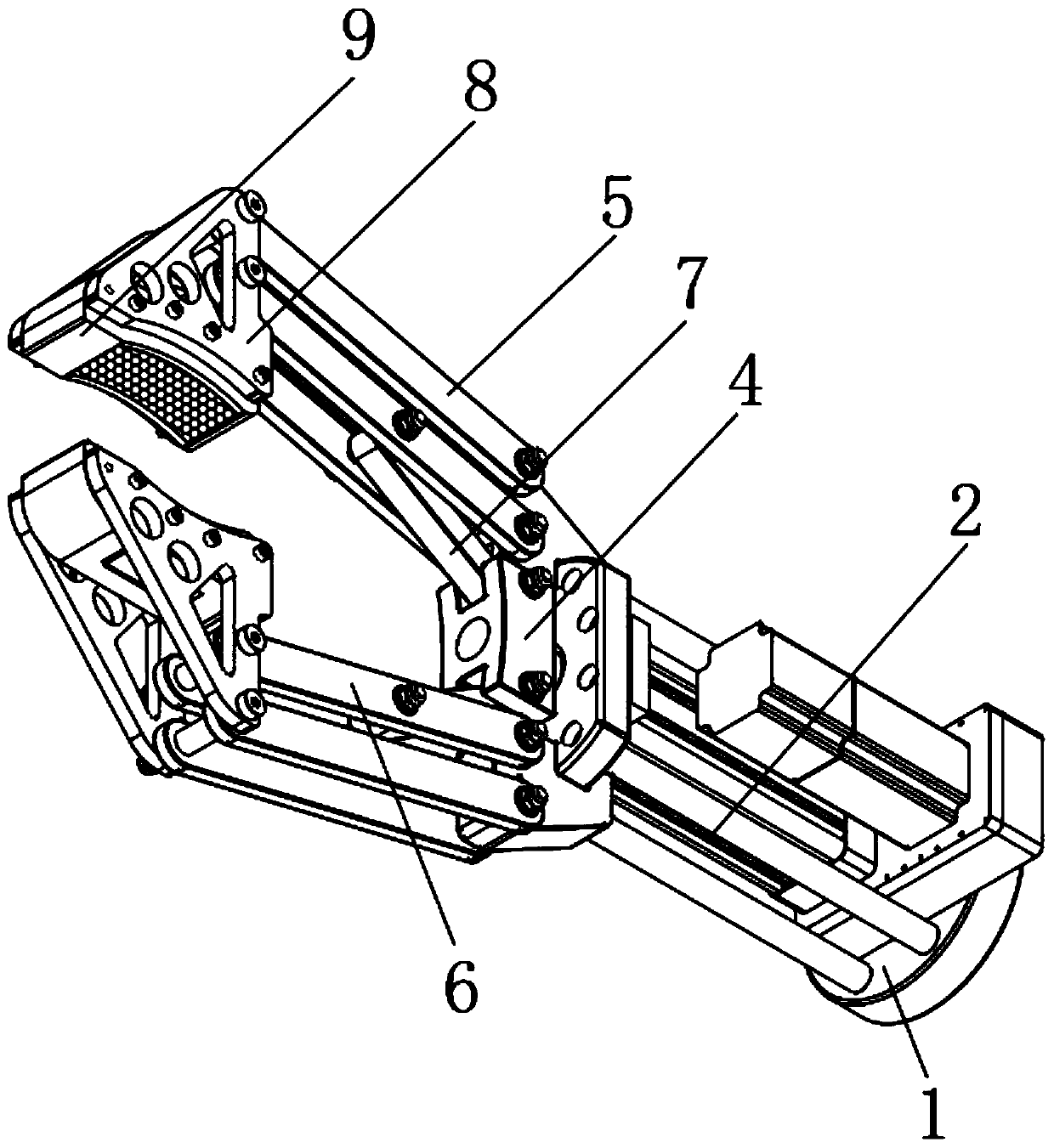
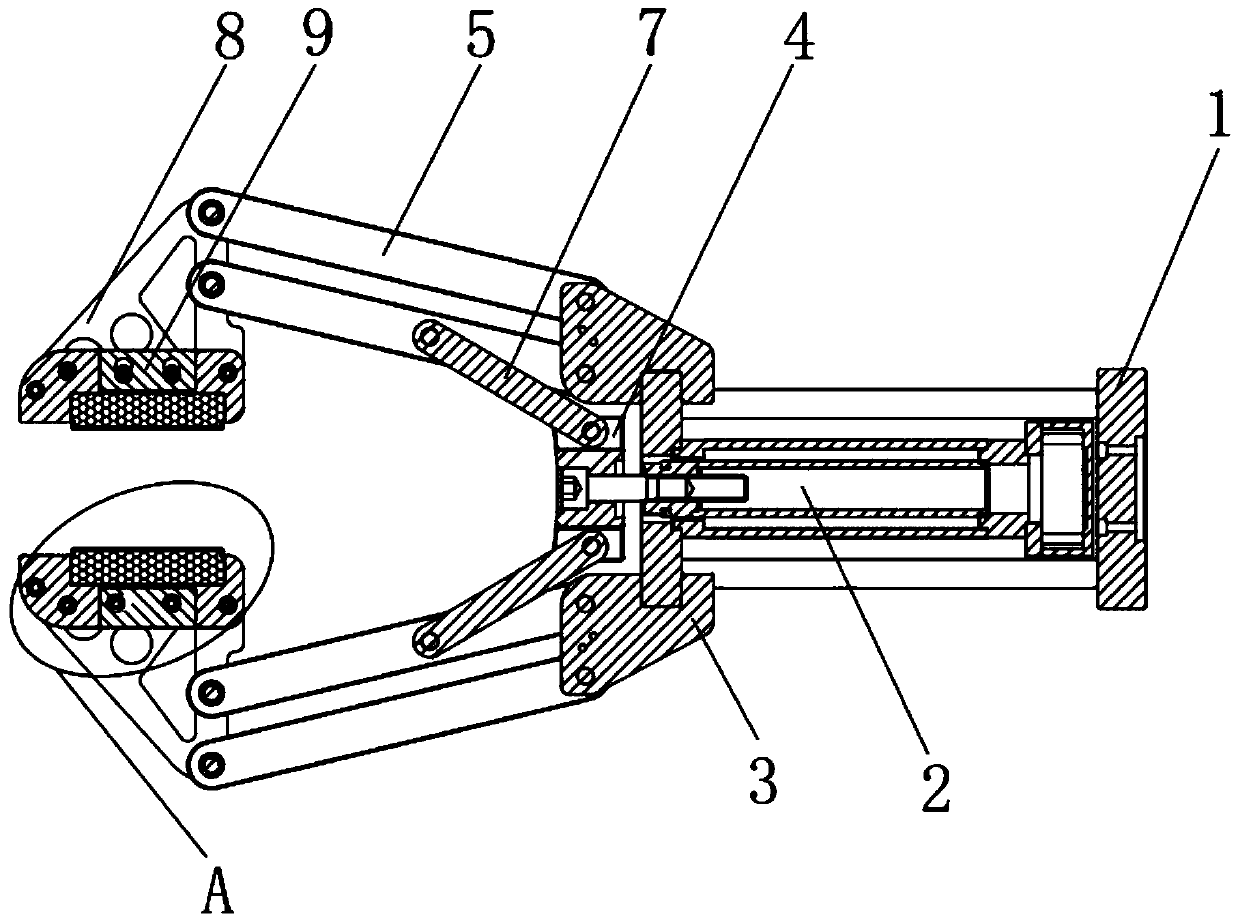
[0027] Reference Figure 1-4 As shown, a clamping jaw mechanism controlled by a servo electric cylinder includes a clamping jaw fixing base 1 and a motor base 3 for connecting with a robot, and a support rod is arranged between the clamping jaw fixing base 1 and the motor base 3 near the edge An electric cylinder 2 is fixedly installed between the clamping jaw fixing base 1 and the motor base 3, and the top of the electric cylinder 2 is equipped with a moving bracket 4, and both sides of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More