

Complex curved surface robot abrasive belt variable feeding self-adaptive grinding method and equipment
A technology for robotic abrasive belts and complex curved surfaces, applied in grinding/polishing equipment, grinding drive devices, metal processing equipment, etc., can solve the problem that the machining allowance cannot be accurately removed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
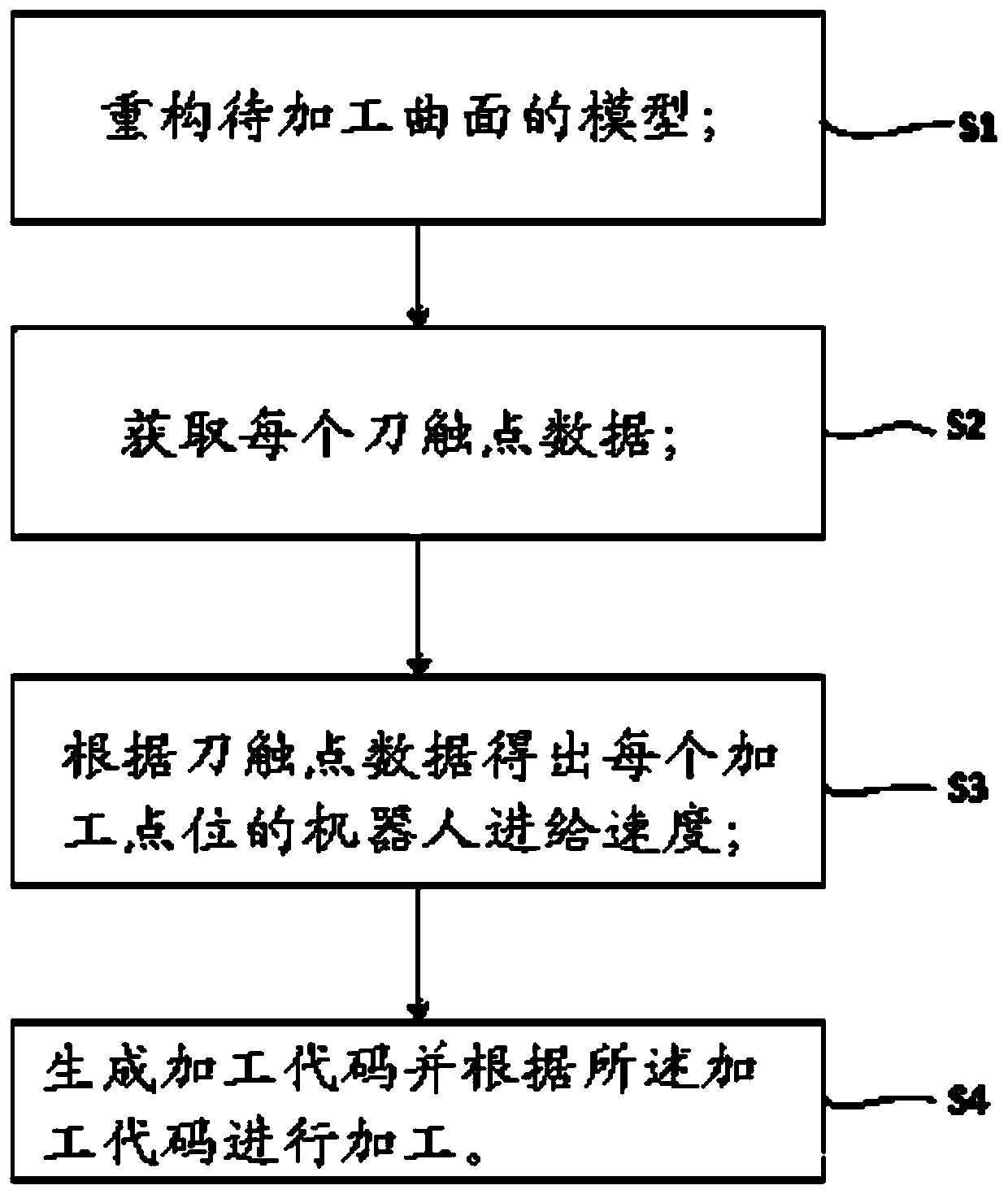
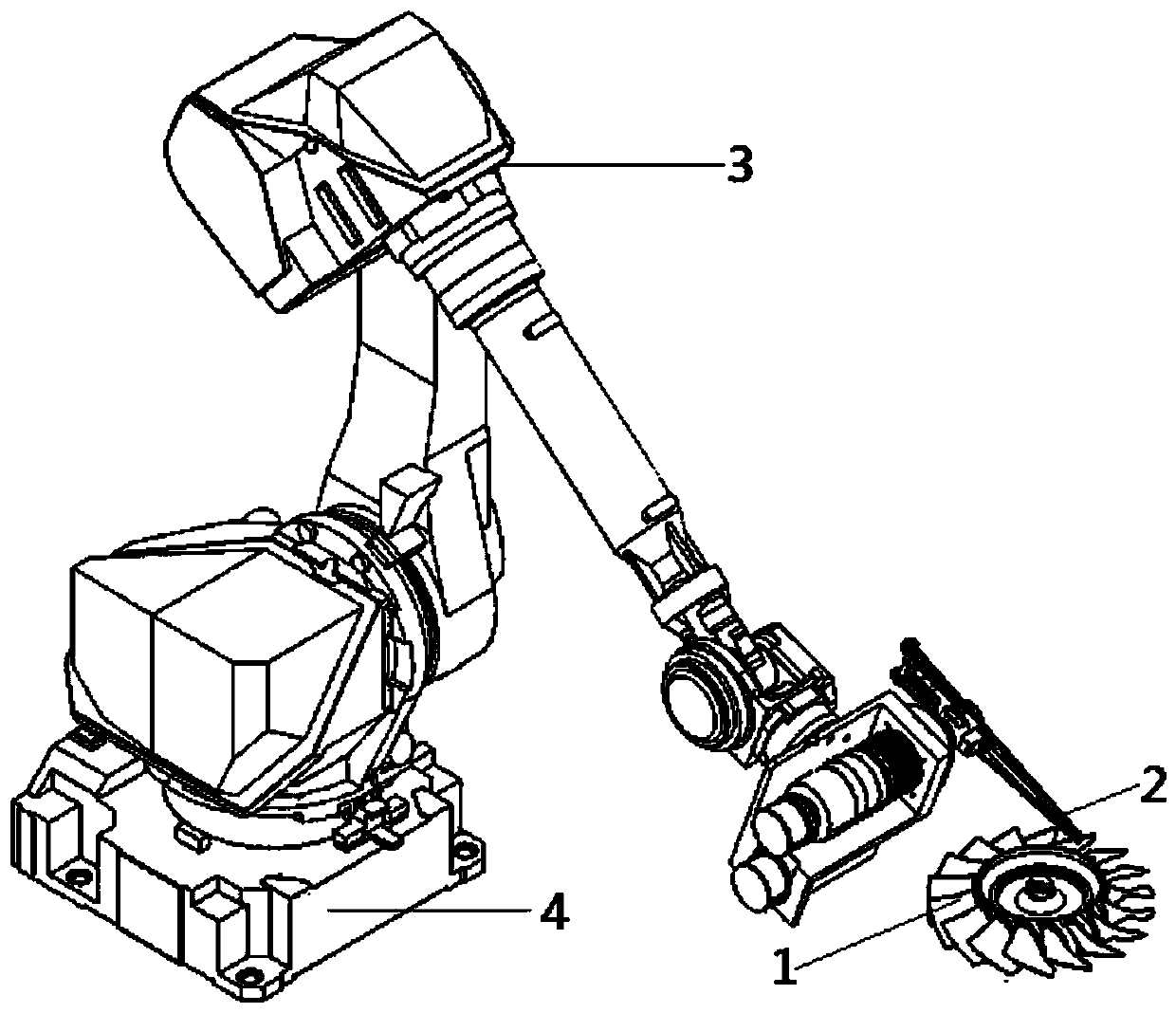
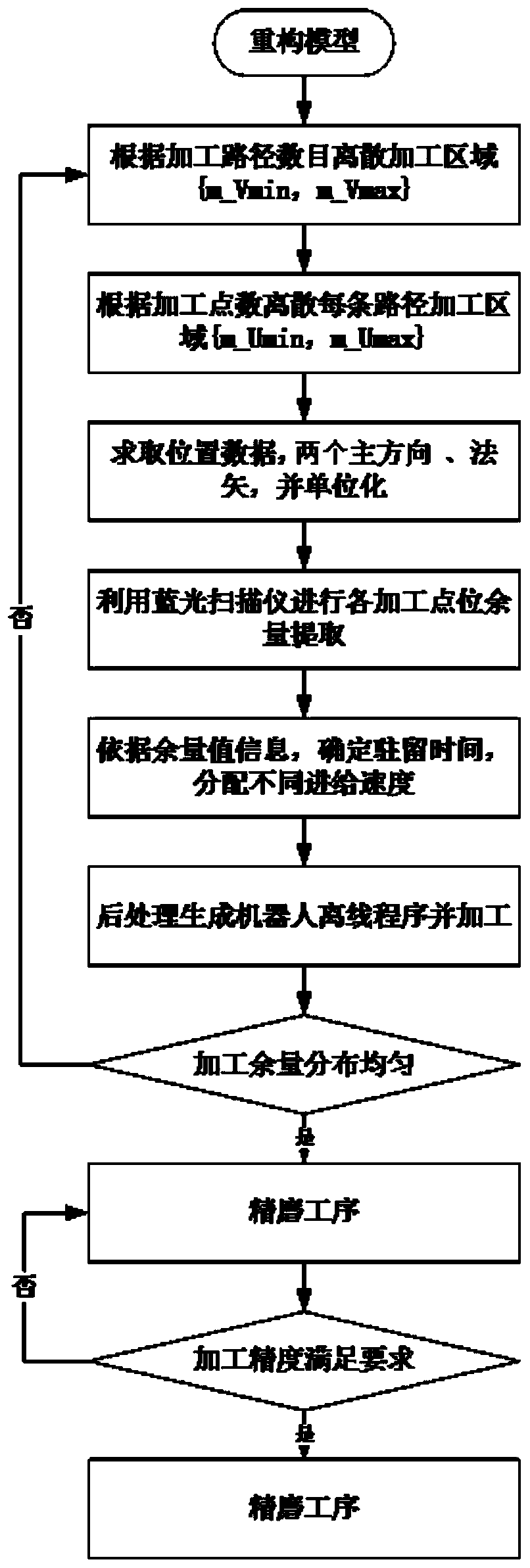
[0046] The core of the present invention is to provide a complex curved surface robot abrasive belt variable feed self-adaptive grinding method, which can solve the technical problem that the machining allowance cannot be accurately removed, thereby improving the grinding precision of complex curved surface parts and quality. Another core of the present invention is to provide a device applied to the above-mentioned complex curved surface robotic abrasive belt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More