

Warehouse mobile robot path planning method based on improved ant colony algorithm
A mobile robot and path planning technology, applied in the field of warehouse management, can solve the problems of unbalanced and fast convergence speed, and achieve the effects of reducing the overall length, avoiding stagnation, and improving speed and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The present invention will be further described in detail below in combination with specific embodiments.
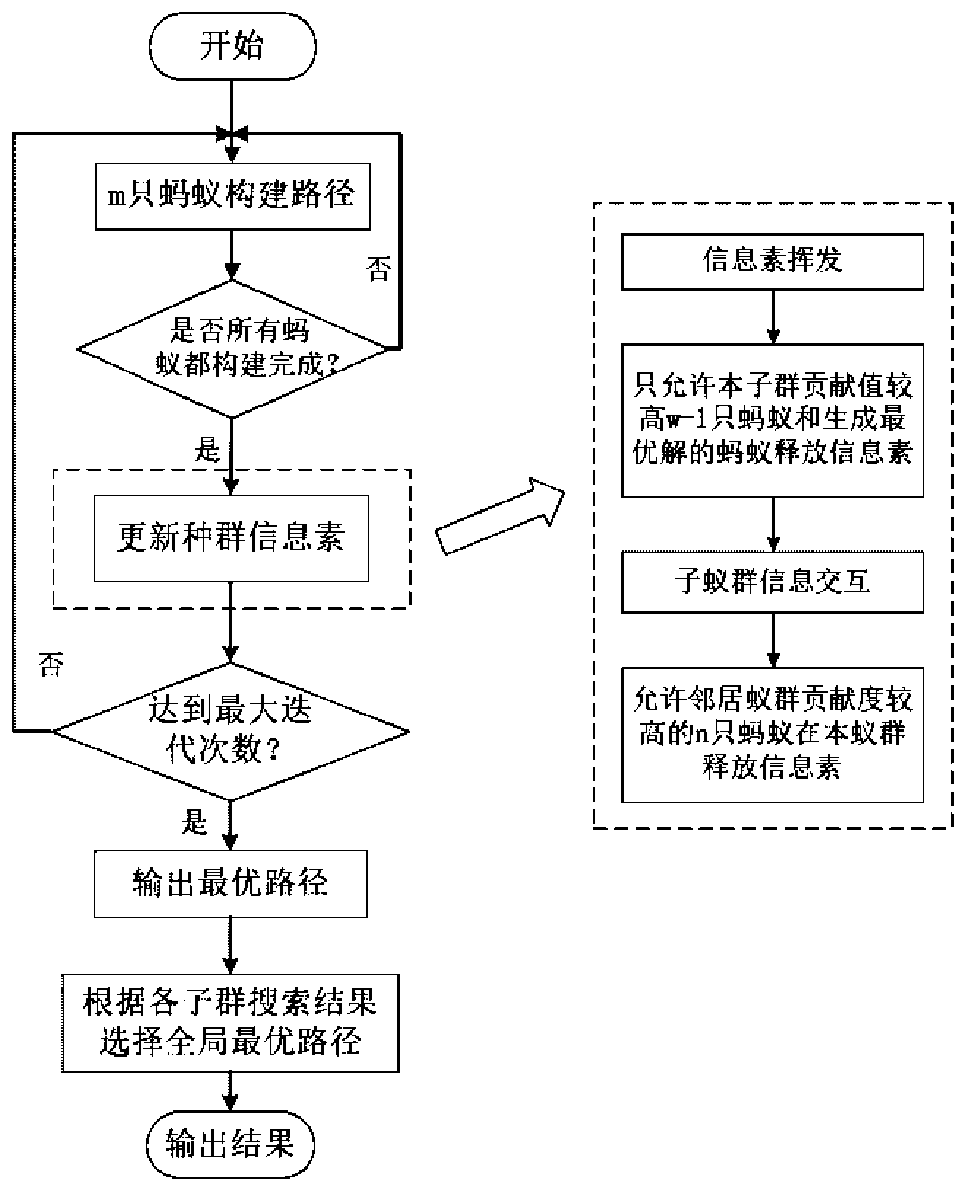
[0059] as attached Figure 1-17 As shown, the present invention provides a method for path planning of warehouse mobile robots based on the improved ant colony algorithm, comprising the following steps:
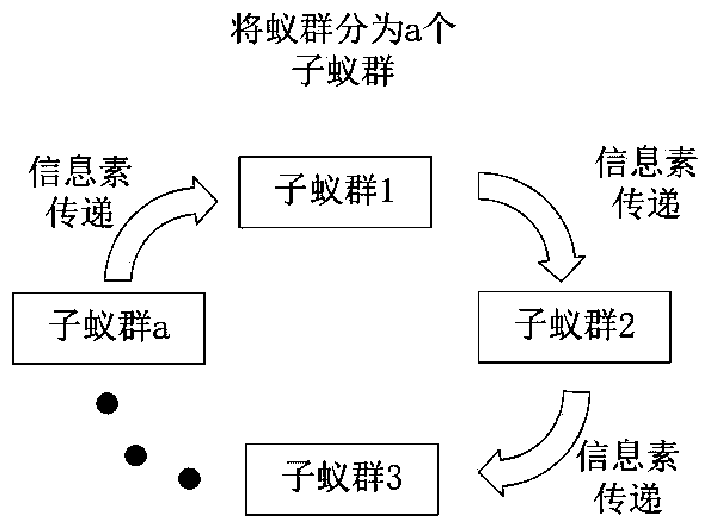
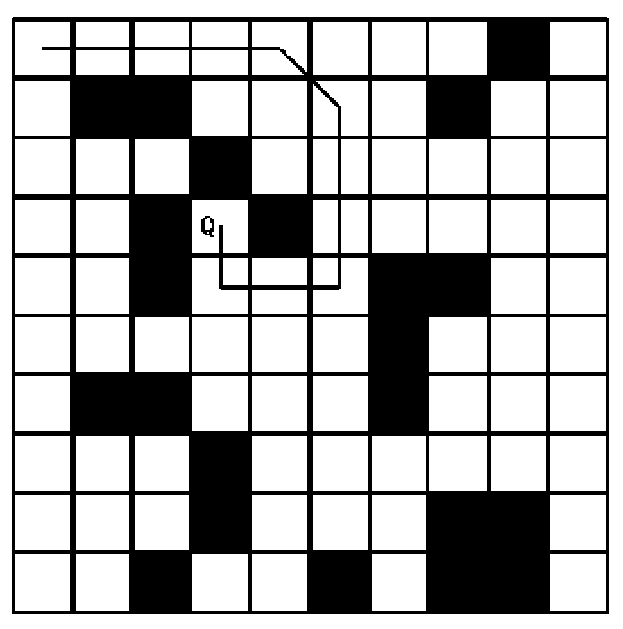
[0060] S1. To facilitate the simplification of the warehouse model, establish a grid map of the warehouse, set the parameters of the ants, and divide the ant colony into several sub-ant colonies; where X is the abscissa axis and Y is the ordinate axis in the warehouse grid map, record Edge (i, j) is the edge connecting node i and node j;
[0061] S2. Use each sub-ant colony to perform path search, and obtain several path search results; sort each sub-ant colony path search result according to the utility function value;
[0062] Each child ant colony conducts a path search process, which specifically includes the following steps:
[0063] S201. All the ants in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More