

Array sucker type rigid-flexible integrated crawling actuator and working method thereof
A suction cup type, actuator technology, applied in suction cups, generators/motors, piezoelectric effect/electrostrictive or magnetostrictive motors, etc., can solve problems such as difficulty in moving, and achieve high practical application value. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] In order to enable those skilled in the art to better understand the technical solutions of the present invention, the present invention will be further described in detail below in conjunction with specific embodiments.
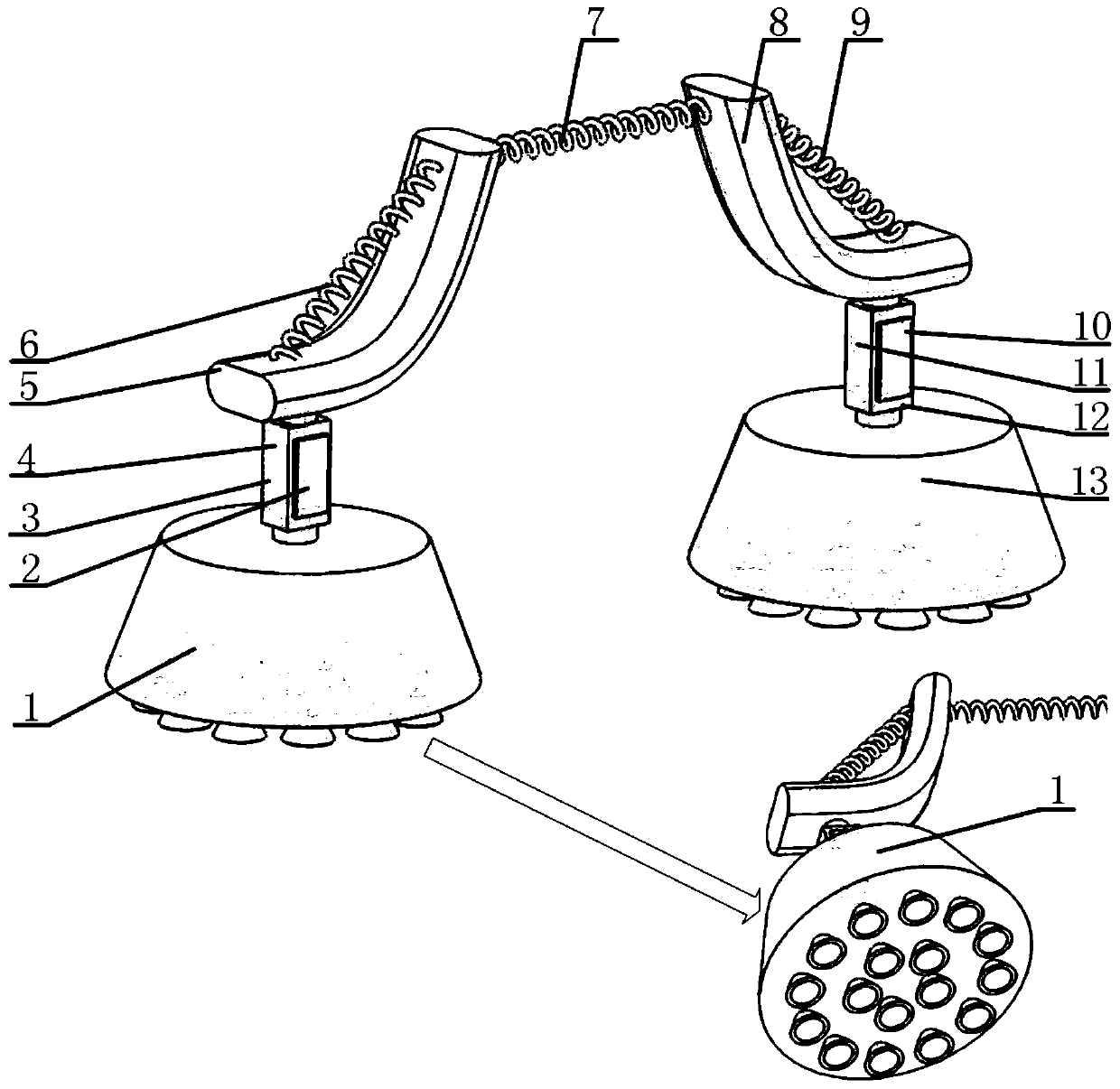
[0026] Array suction cup type rigid-flexible crawling actuator, such as figure 1 As shown, it includes: the first flexible array suction cup 1, the first piezoelectric ceramic sheet 2, the second piezoelectric ceramic sheet 3, the first cuboid base 4, the first flexible bending beam 5, the first telescopic rod 6, the second telescopic Rod 7 , second flexible bending beam 8 , third telescopic rod 9 , third piezoelectric ceramic sheet 10 , fourth piezoelectric ceramic sheet 11 , second rectangular parallelepiped base 12 , and second flexible array sucker 13 .
[0027] Among them, the first flexible array suction cup 1 , the first piezoelectric ceramic sheet 2 , the second piezoelectric ceramic sheet 3 , the first cuboid base 4 , the first flexible bendi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More