

Astronaut low-gravity motion simulation exoskeleton
A technology of motion simulation and exoskeleton, which is applied to the simulation device, simulator, transportation and packaging of space navigation conditions, and can solve the problems of short time, high simulation cost, and short tower drop simulation time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be described in further detail below in conjunction with the accompanying drawings.
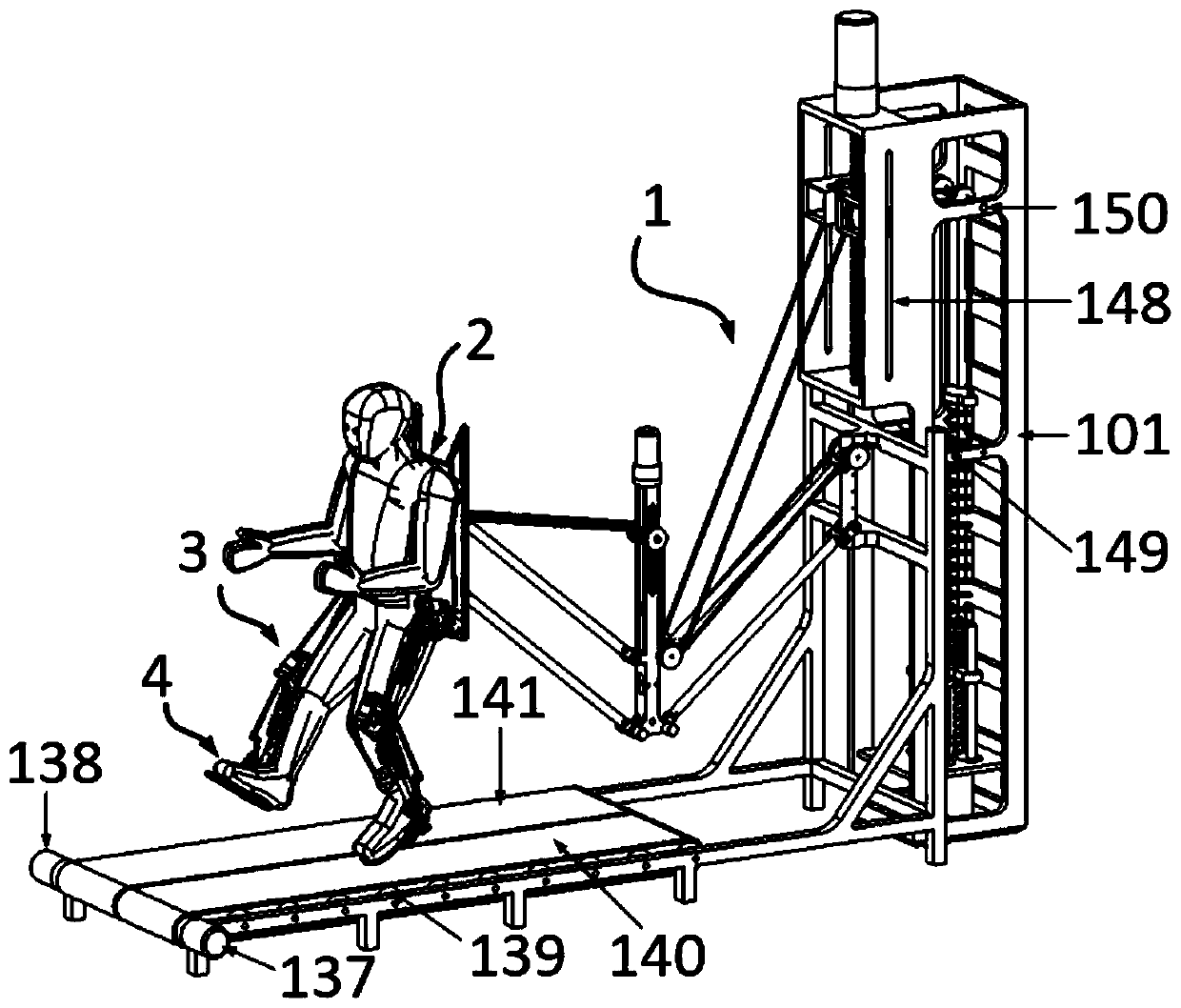
[0040] like figure 1 Shown: This invention patent is designed for a low-gravity movement simulation exoskeleton overall system for astronauts, including 1 overall gravity balance mechanism, 2 exoskeleton back balance mechanism, 3 exoskeleton legs, 4 exoskeleton feet, a total of four parts, such as figure 1 shown.
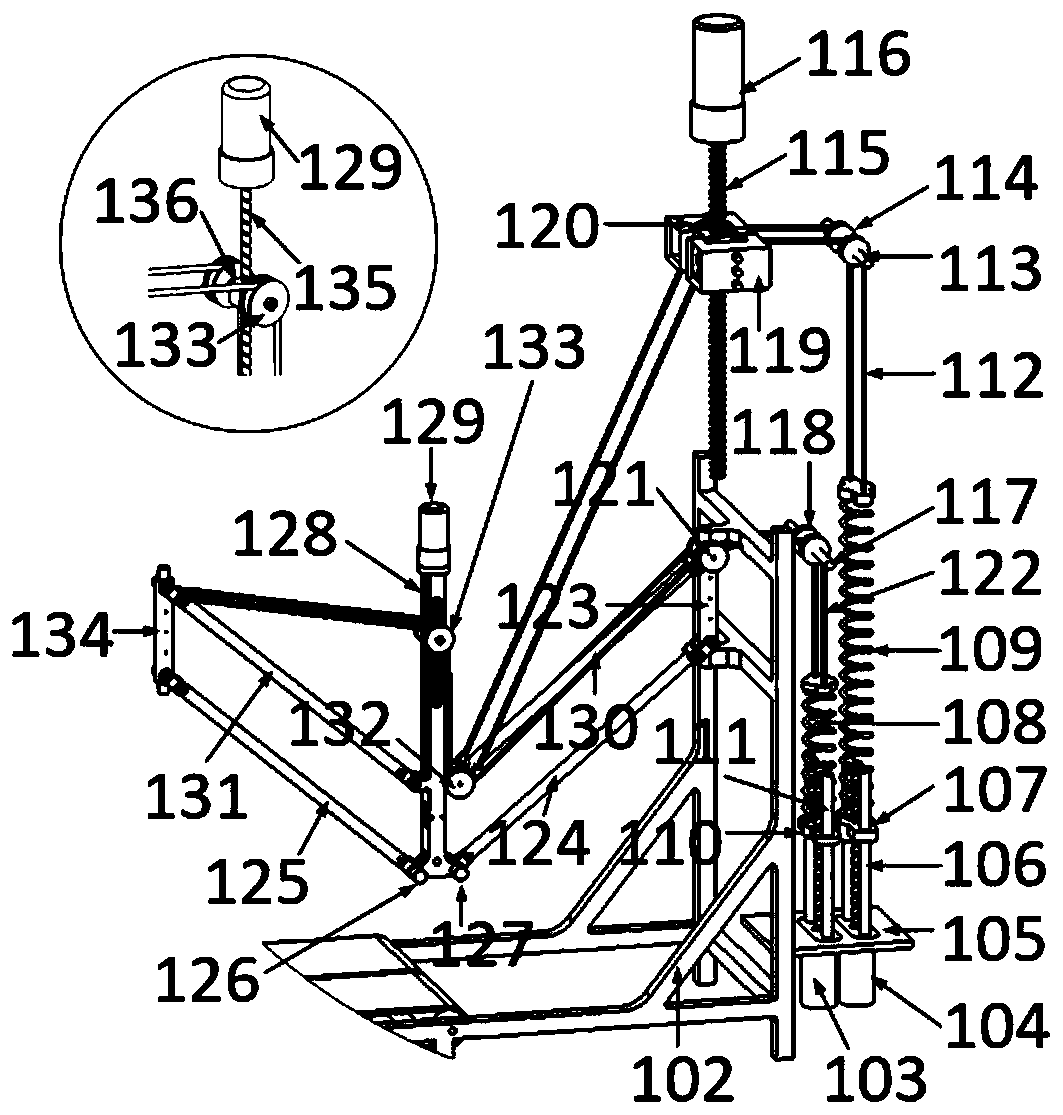
[0041] like figure 2 image 3 As shown: the whole system is supported by the bracket base 102, the vertical frame 101 is fixed on the back of the bracket base 102, the linear motor 1 103 and the linear motor 2 104 are fixedly connected to the bottom of the bracket base 102 through the balance motor bracket 105, and the balance motor bracket There are screw rod optical axis one 111 and screw rod optical axis two 106 on 105, slide block two 107 is connected with the nut of linear motor two 104, and can slide on screw rod optical axis 106; Slide ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More