

Adjustable climbing robot
A robot and adjustable technology, applied in the field of climbing robots, can solve the problems of inconvenient construction, few types of robots, lifting, etc., and achieve the effect of convenient adjustment, convenient inspection operations, and flexible movable arm structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] Below with reference to the accompanying drawings, through the description of the embodiments, the specific embodiments of the present invention will be described in further detail, the purpose is to help those skilled in the art to have a more complete, accurate and in-depth understanding of the concept and technical solutions of the present invention, and contribute to its implementation.
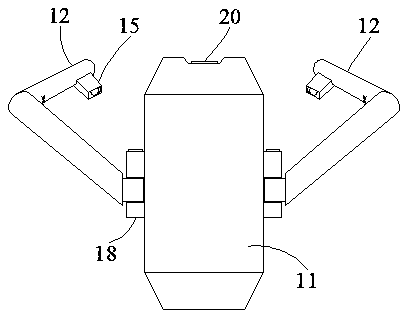
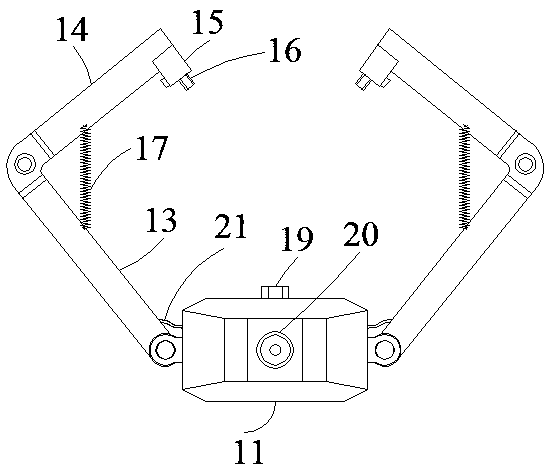
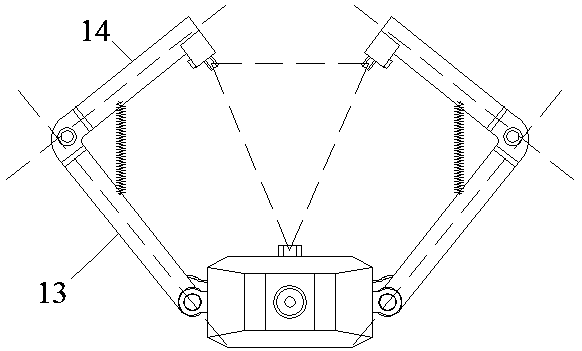
[0029] like Figure 1 to Figure 11 As shown in the figure, this embodiment provides an adjustable climbing robot, which can flexibly perform climbing operations on tall trees and smooth electric poles, and has a camera to enable it to perform climbing operations at high altitudes. The parts are photographed, which is convenient for the construction personnel to inspect the operation; it has a flexible movable arm structure, which makes it easy to adjust, so that it can be used in places such as trees and telephone poles of different sizes.
[0030] like Figure 1-Figure 3 As show...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More