

Two-degree-of-freedom variable-rigidity ball-and-socket joint of robot
A ball-and-socket joint, degree of freedom technology, applied in the field of robotics, can solve the problem of flexibility difficult to meet the requirements of human-machine integration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be described in further detail below in conjunction with the accompanying drawings.
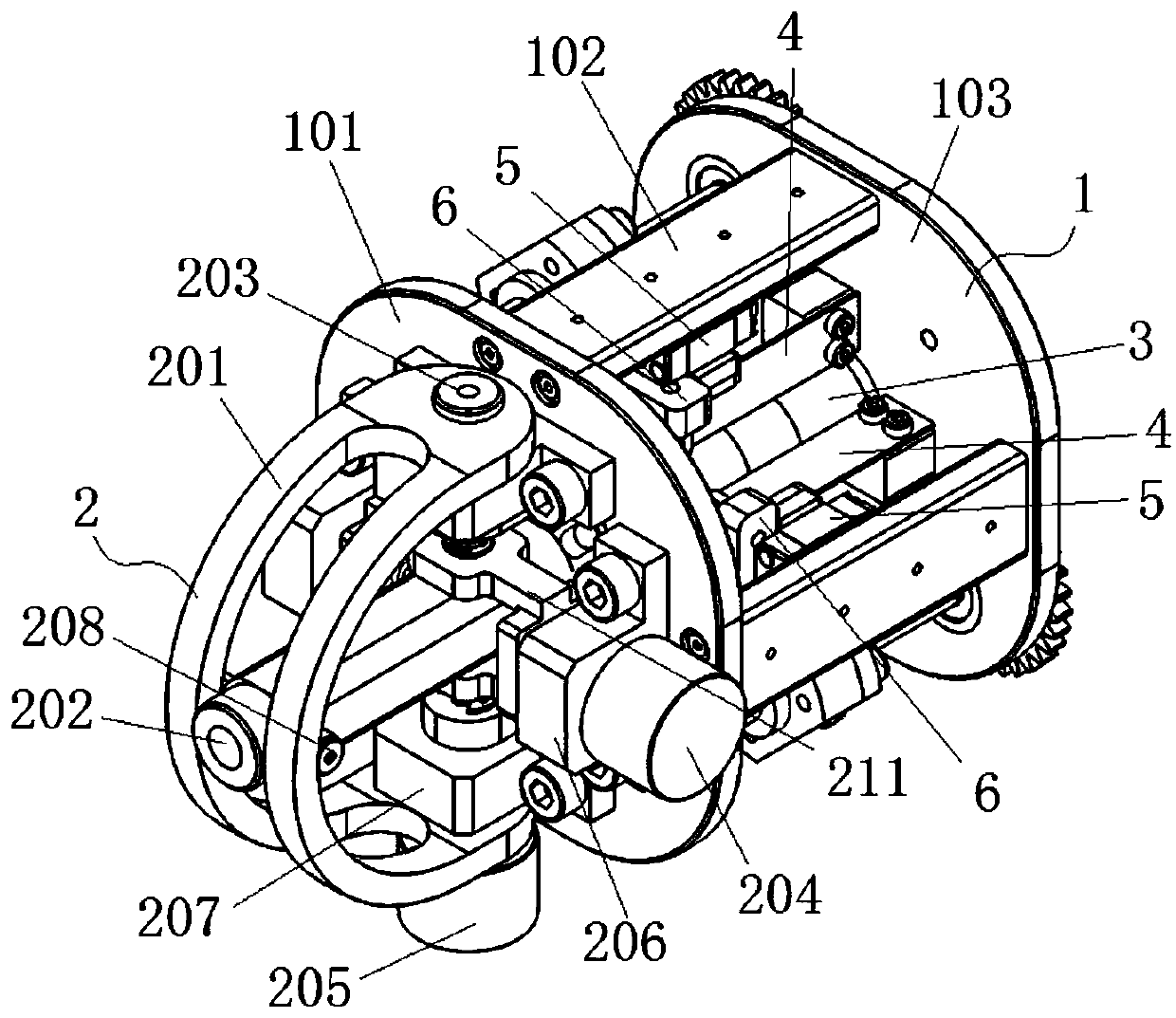
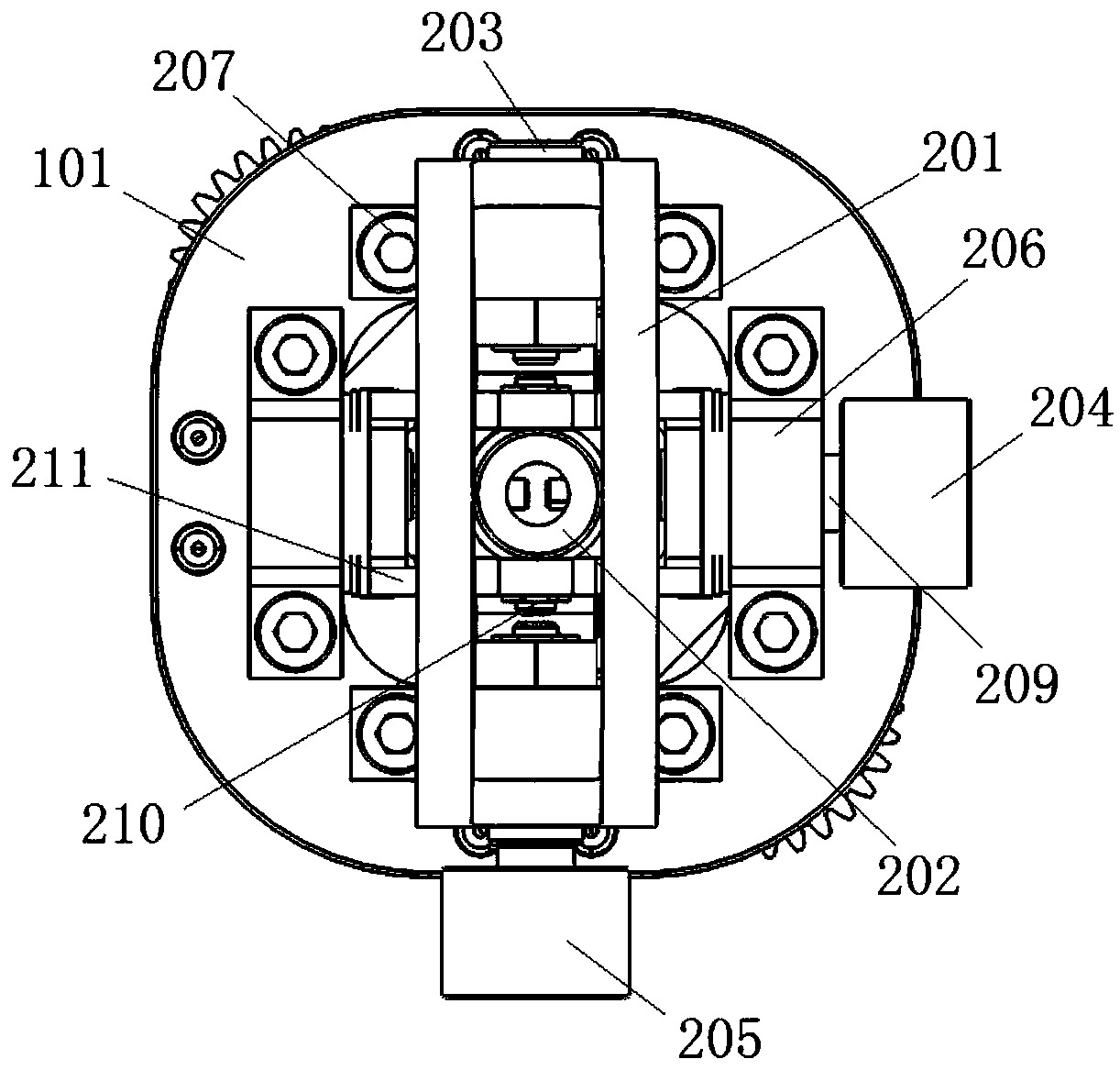
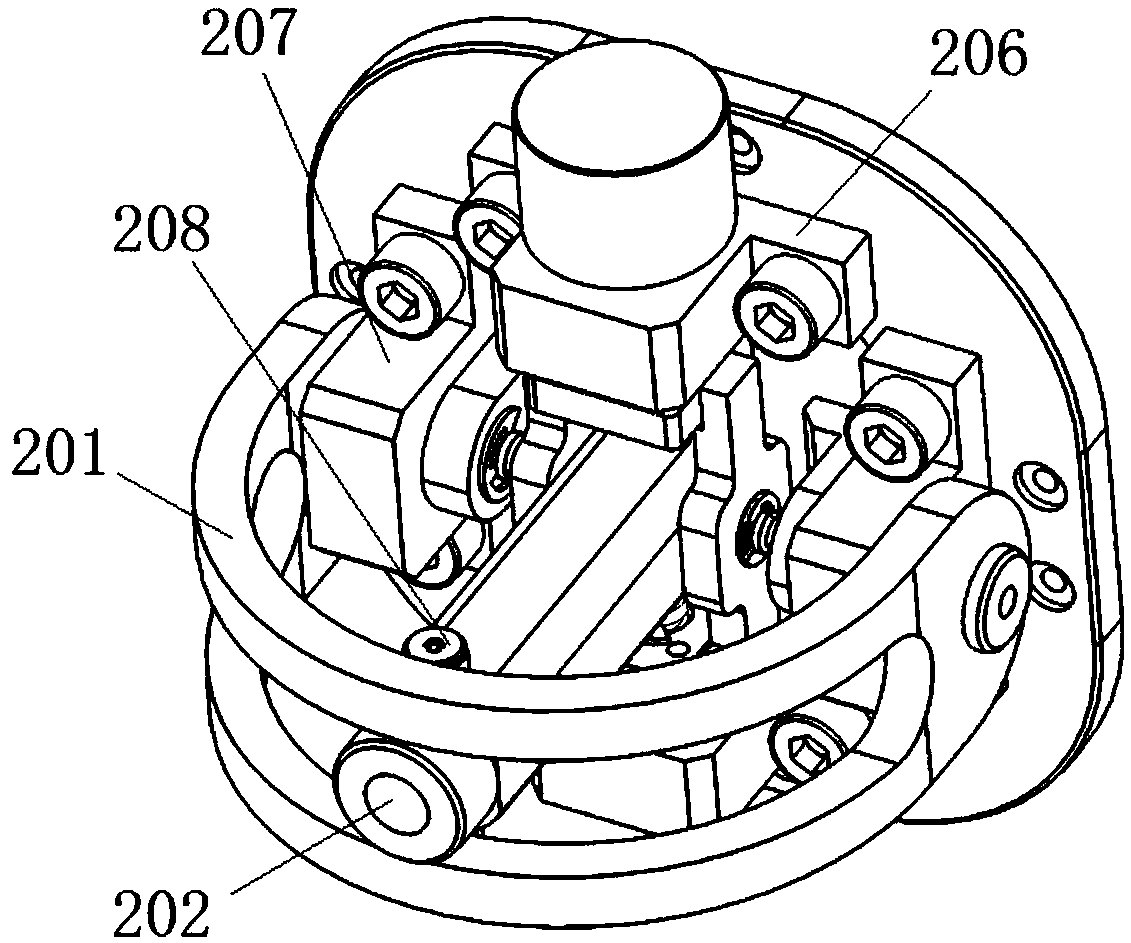
[0026] Such as Figure 1~6 As shown, the present invention includes a support frame 1, a ball and socket mechanism 2, a leaf spring mechanism and a stiffness adjustment mechanism, wherein the support frame 1 includes a front plate 101, a rear plate 103 and a plurality of support plates 102, and the front plate 101 passes through each The support plate 102 is connected with the rear plate 103, the front plate 101 is provided with a ball and socket mechanism 2, and a leaf spring mechanism is provided inside each support plate 102, and the leaf spring mechanism includes a cam follower block 6 and two leaf springs 4. The stiffness adjustment mechanism is set in the support frame 1, and the cam follower block 6 is driven to move by the stiffness adjustment mechanism, such as Figure 5 As shown, the cam follower block 6 is provided with two cams 601, and the two l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More