

A self-calibration method of laser displacement sensor
A laser displacement and laser sensor technology, applied in the field of laser calibration, can solve the problems of low self-calibration accuracy and low self-calibration efficiency, and achieve the effects of strong industrialization and automation capabilities, high precision and high efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
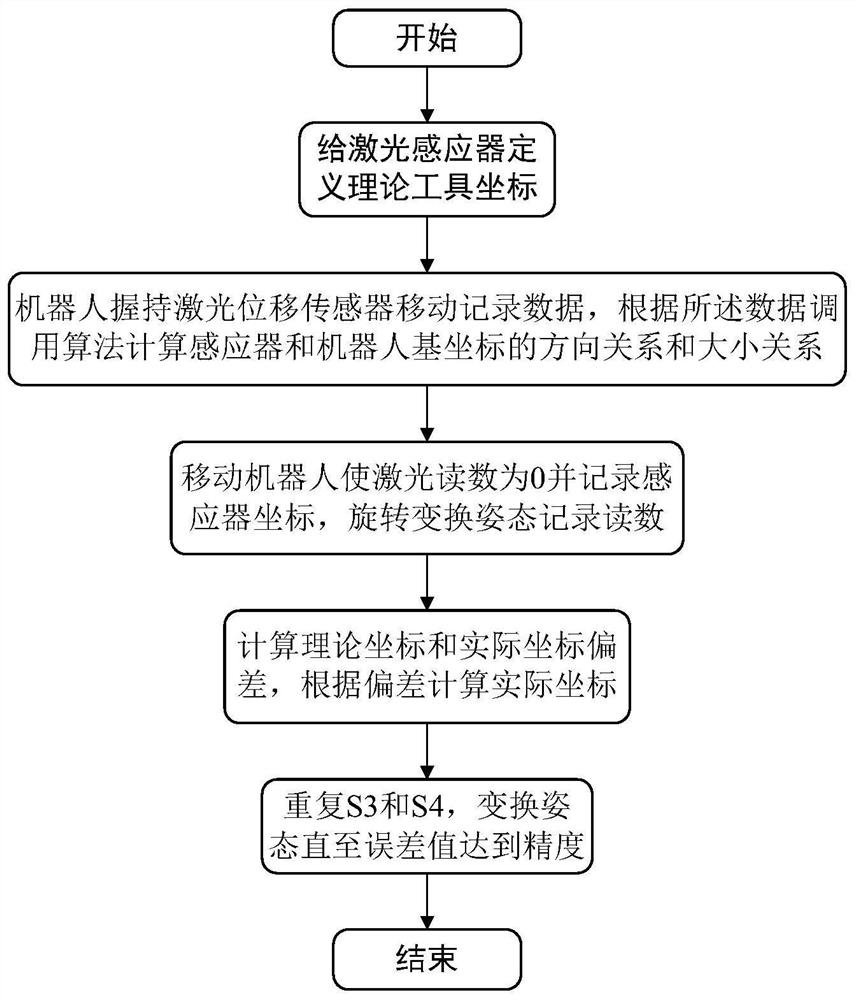
[0044] In this embodiment, a laser displacement sensor self-calibration method, such as figure 1 shown, including the following steps:
[0045] Step S1: define theoretical tool coordinates for the laser sensor;
[0046] Step S1 specifically includes the following steps:
[0047] S11: Take the position where the laser reading is 0 as the origin of the theoretical tool coordinates;
[0048] S12: Define the theoretical tool coordinates with the laser direction as the z-axis.
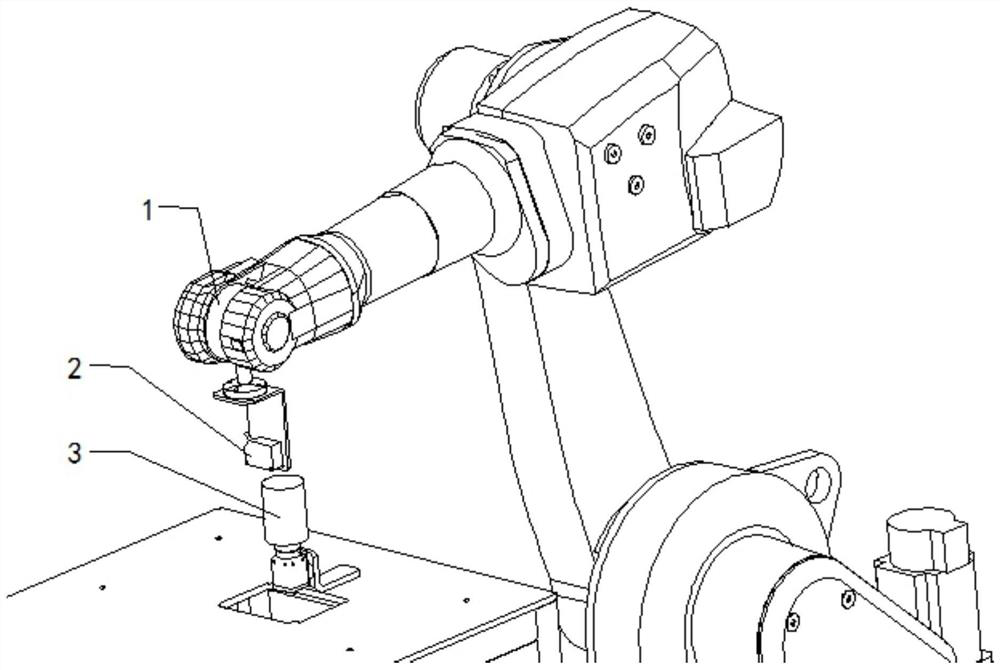
[0049] Step S2: The robot holds the laser displacement sensor to move and record data, and calls an algorithm to calculate the direction relationship and size relationship between the sensor and the robot base coordinates according to the data;
[0050] Step S2 specifically includes the following steps:
[0051] S21: The robot holds the laser displacement sensor and moves 5mm along the x-axis of the base coordinate;
[0052] S22: The robot holds the laser displacement sensor and moves 5mm along the y-a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More