

A Tensioned Structure for Fully Actuated Finger Pneumatic Muscles in Robots
A pneumatic muscle and full-drive technology, applied in the field of robotics, can solve problems such as severe coupling of different joints, inability to dexterously operate the target object, and loose tendons and ropes.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0027]A full-driven flexible handle with a highly driven passive adjustment based on pneumatic muscles, the main purpose is to increase the operation of the smart hand and improve the life of the smart hand.
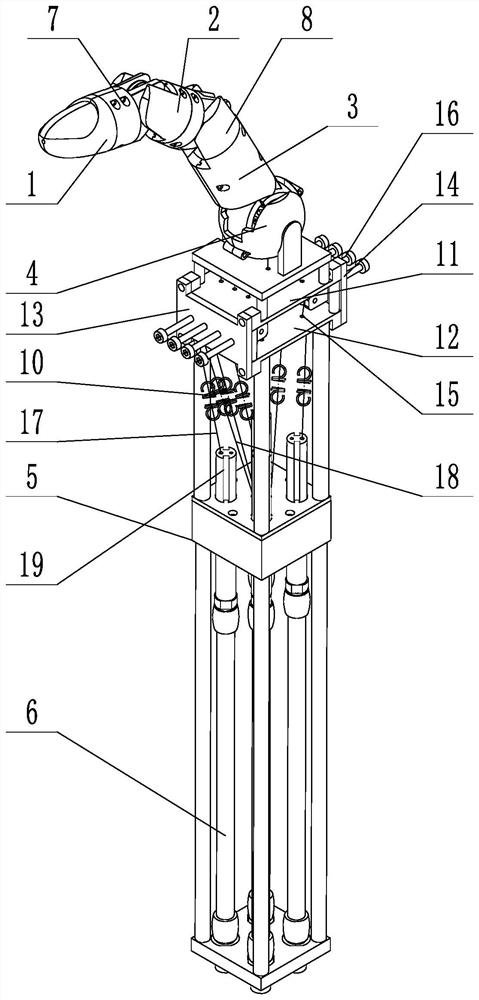
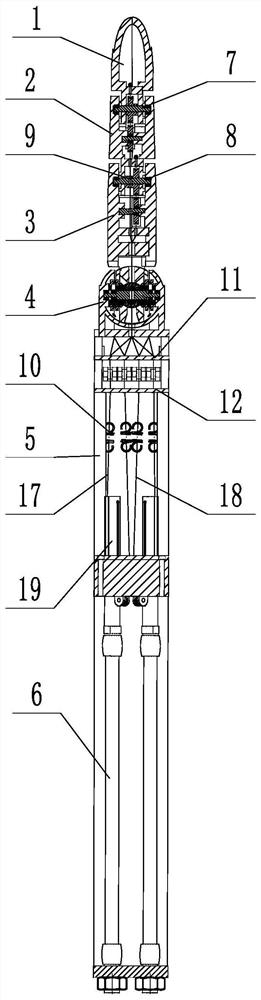
[0028]The informative hand of the present invention is mainly composed of a fully driven finger, a bottom bracket, and a necessary transmission as the five shape dimensions. Among them, iffigure 1 As shown, the full drive finger is an important part of the weak hand, which is mainly made from the distal finger end 1, the middle finger end 2, the near finger end 3, the ball joint 4, single-finger pneumatic muscle bracket 5, and pneumatic muscle 6 . The bottom bracket is supported by five pieces of support. Two-two support block hinges, and corresponding drives have corresponding drives on the corresponding hinge axis. The structural use of the bottom bracket is in that the support blocks can be rotated along the axis, facilitating increasing the degree of grant of finger operating...
Embodiment 2
[0040]Example 2 On the basis of the structures of Example 1, the following structure is included:
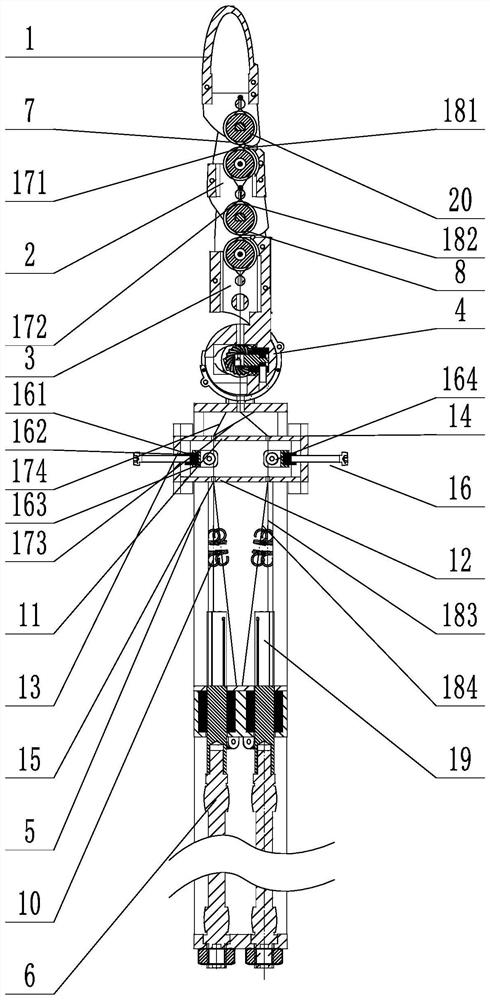
[0041]Such asFigure 5As shown, the two open places of the box structure are provided with corresponding third plate and fourth flat plate, and the third plate and the third plate are rotated and connected to the roller 22 of the cross section, the drum 22 in the axial direction. Outside the casing extends, the adjustment handle is disposed, and the drum is disposed above the pre-tightening bearing, the drum disguise the tendon rope. Adjusting the handle thread connection on the corresponding third tablet, by adjusting the adjustment handle, adjusting the roller 22 attitude, thereby adjusting its position with the tendon rope, and achieves all of the 8 zones. Combined with the pre-tightening screws to make tensioned convenience and custom tensioning of each tendon rope.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More