

Novel ankle joint rehabilitation parallel mechanism
A technology of ankle joints and parallel connection, which is applied in the direction of pivot connection, passive exercise equipment, physical therapy, etc., can solve the problems of difficult processing accuracy and loss of freedom, etc., and achieve low manufacturing processing accuracy, easy realization, and simple structure Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
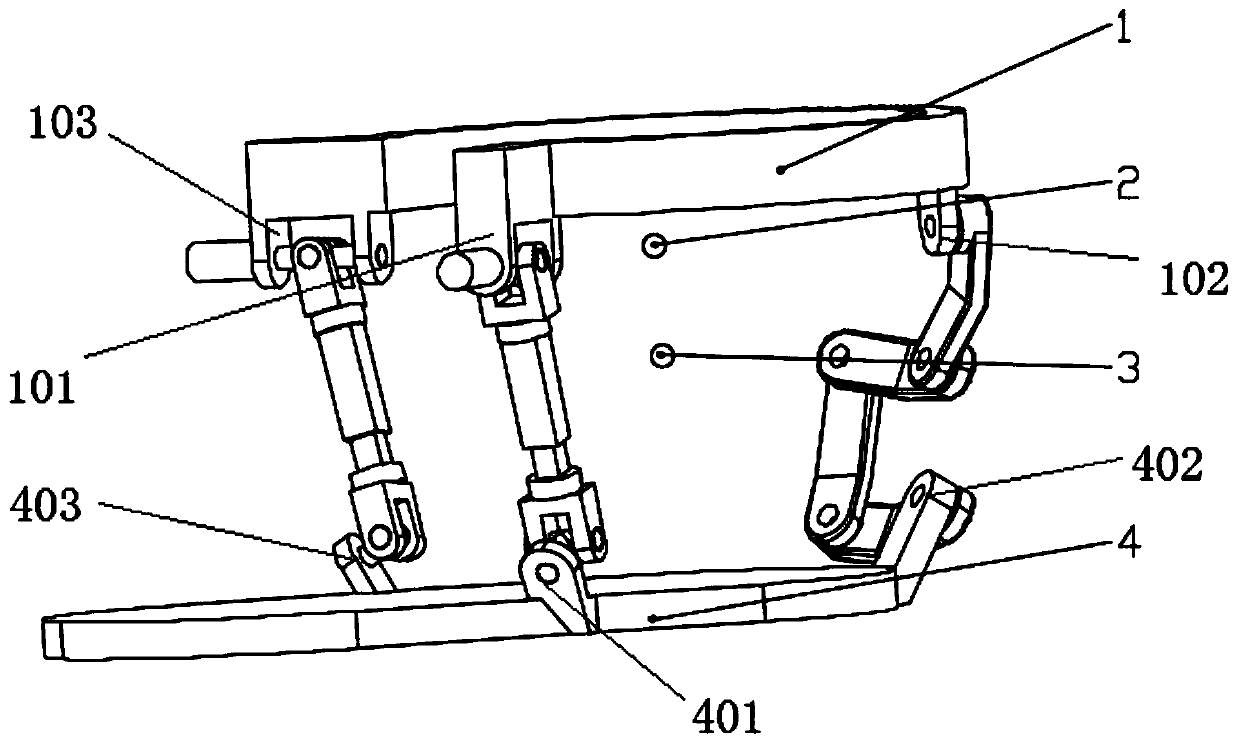
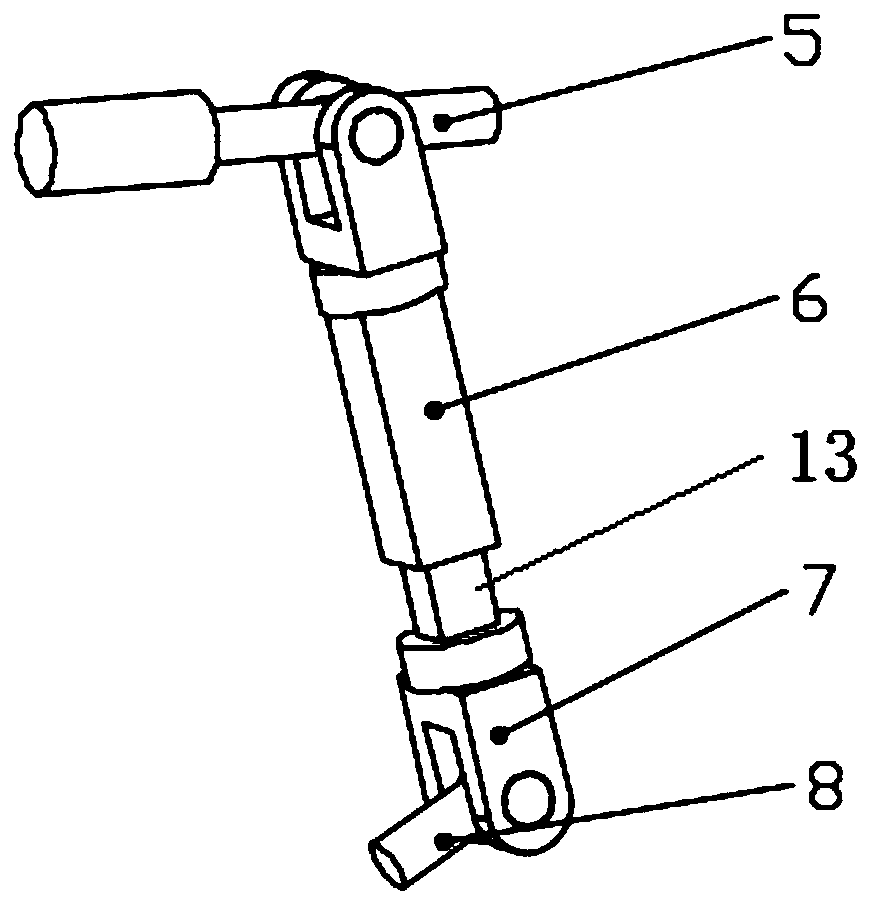
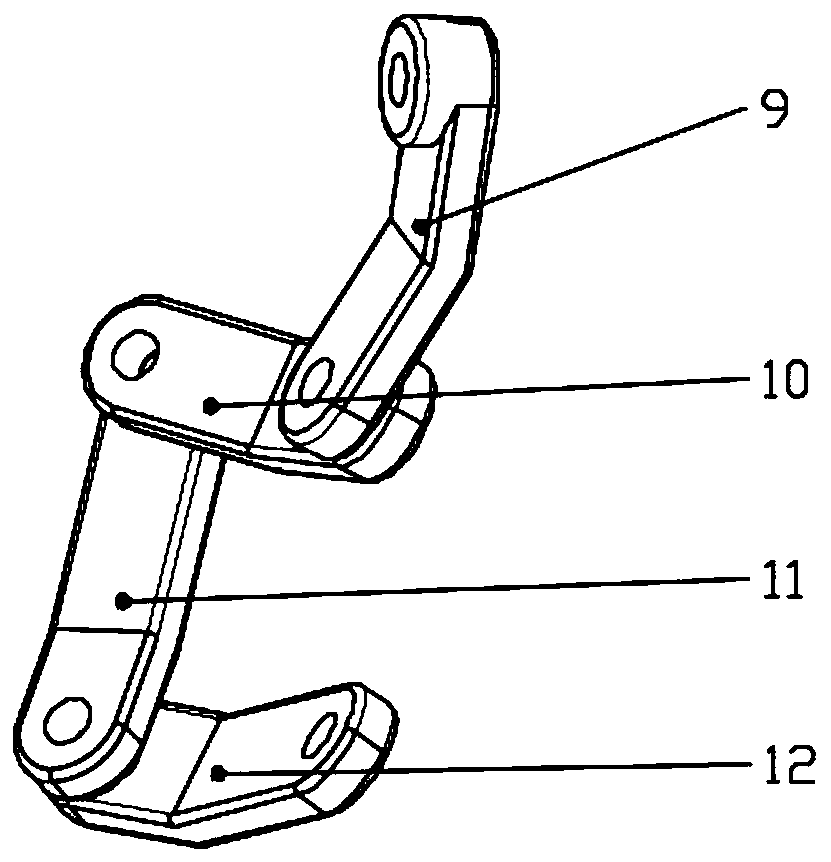
[0031] A kind of novel ankle joint rehabilitation parallel mechanism of this embodiment (referring to Figure 1-3 ), including static platform 1, dynamic platform 4, two UPU branch chains and one AABA branch chain;
[0032] The static platform 1 is evenly distributed on the circumference with the No. 1 hinge support 101 of the static platform, the No. 2 hinge support 102 of the static platform, and the No. 3 hinge support 103 of the static platform. The axes of the hinge holes of the three static platform hinge supports Converge at one point, this point is the fixed ball center 2 of the parallel mechanism;
[0033] On the moving platform 4, the No. 1 hinge support 401 of the moving platform, the No. 2 hinge support 402 of the moving platform and the No. 3 hinge support 403 of the moving platform are evenly distributed on the circumference, and the axes of the hinge holes of the three moving platform hinge supports Converge at one point, this point is the moving ball center 3 ...
Embodiment 2
[0042] A kind of novel ankle joint rehabilitation parallel mechanism of this embodiment (referring to Figure 1-3 ), including static platform 1, dynamic platform 4, two UPU branch chains and one AABA branch chain;
[0043] The static platform 1 is evenly distributed on the circumference with the No. 1 hinge support 101 of the static platform, the No. 2 hinge support 102 of the static platform, and the No. 3 hinge support 103 of the static platform. The axes of the hinge holes of the three static platform hinge supports Converge at one point, this point is the fixed ball center 2 of the parallel mechanism;
[0044] On the moving platform 4, the No. 1 hinge support 401 of the moving platform, the No. 2 hinge support 402 of the moving platform and the No. 3 hinge support 403 of the moving platform are evenly distributed on the circumference, and the axes of the hinge holes of the three moving platform hinge supports Converge at one point, this point is the moving ball center 3 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More