

An unmanned agricultural robot driven by flexible cables in parallel and its control method
A robot and flexible cable technology, applied in the control field of unmanned agricultural robots, can solve the problems of low degree of automation of ground operations and low precision of aerial operations, so as to ensure the stability and accuracy of movement, improve the degree of automation, and reduce inclination Effect of torsional error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
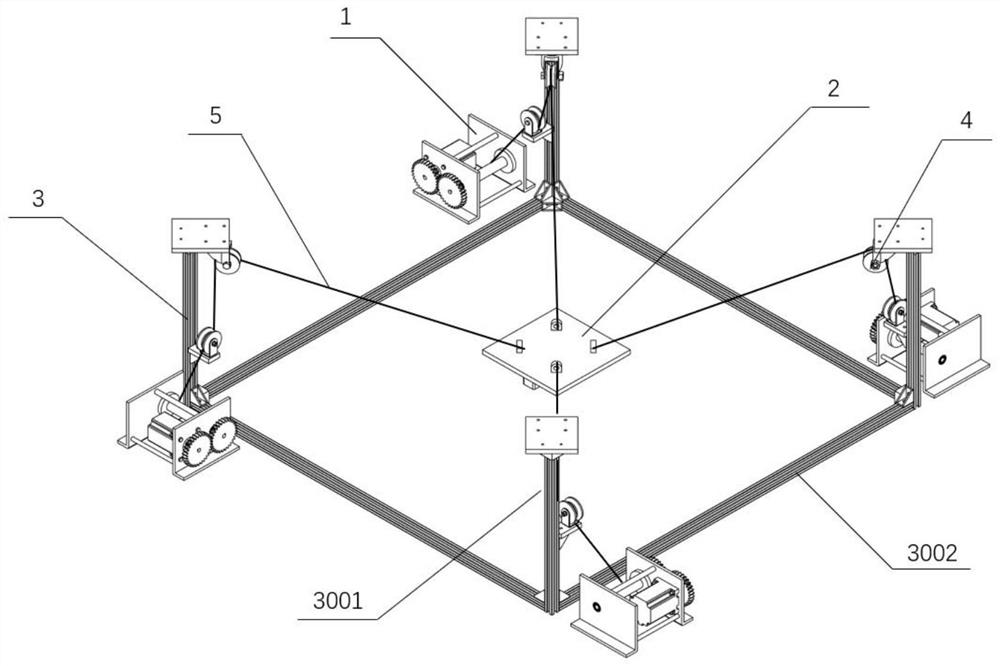
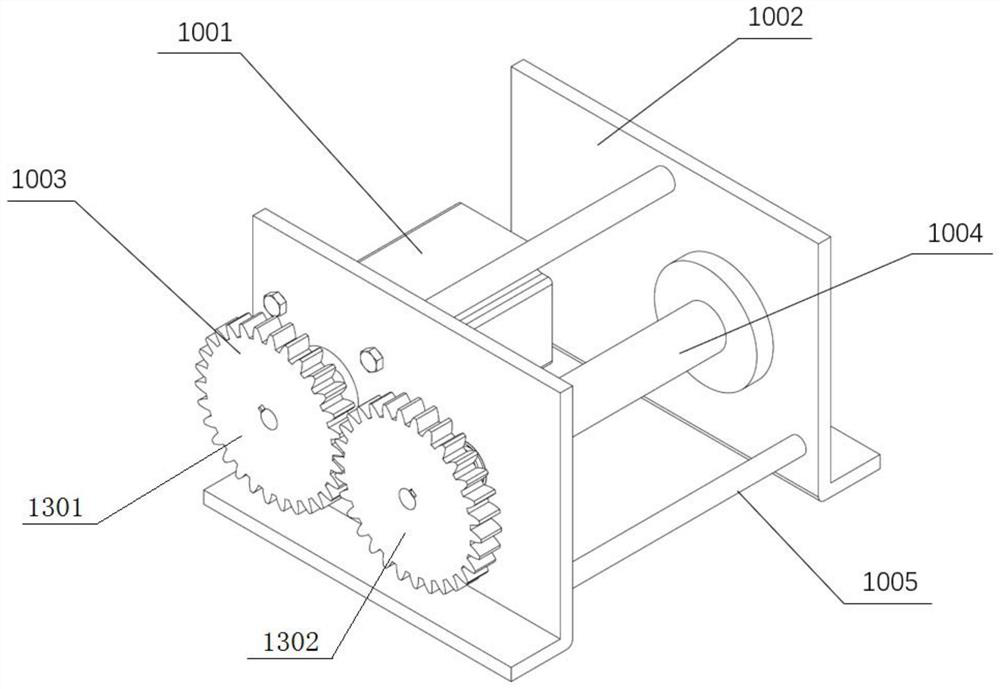
[0045] see Figure 1-7 , the present embodiment provides an unmanned agricultural robot driven in parallel by cables, and the robot is used for hoisting at least one agricultural equipment. The unmanned agricultural robot provided in this embodiment takes the four-cable parallel structure as the basic structure, and realizes the platform movement by controlling the expansion and contraction of the flexible cables for operation. In this embodiment, the unmanned agricultural robot includes a mobile platform 2, a tower system, a winch system 1, a cable 5, an ultrasonic module and a control system. Among them, the number of flexible cables 5 is at least four, and the mobile platform 2 is driven in parallel.
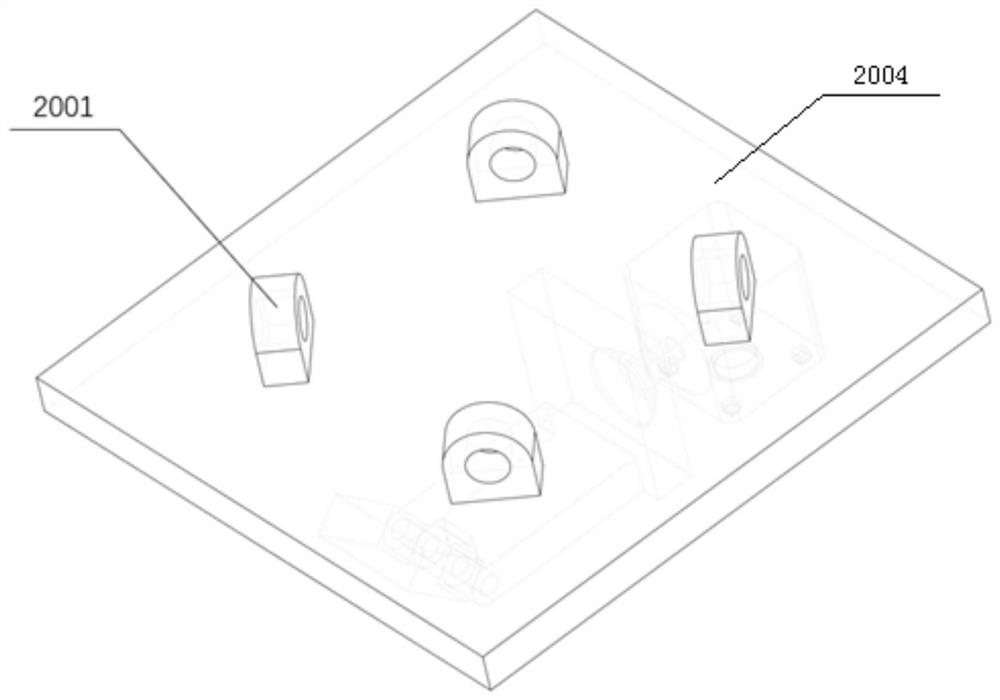
[0046] read on image 3 and Figure 4 , the mobile platform 2 includes a workbench 2004 and an automatic hook and lock device 2003 , and in this embodiment, the mobile platform 2 may further include a rope fixing part 2001 and a camera device 2002 . In this embodiment, th...
Embodiment 2
[0062] This embodiment provides an unmanned agricultural robot driven in parallel by cables, which adds some control functions of the control system on the basis of Embodiment 1. Among them, the control system is used to start the camera device 2002 to collect the image information of the agricultural equipment when the workbench 2004 is located above the agricultural equipment; Search and extract preset equipment features whose feature similarity reaches a preset ratio, then obtain the equipment information of agricultural equipment according to the preset equipment features, and finally drive the winch system 1 to adjust the position of the workbench 2004 according to the equipment information, so that The automatic hook lock device 2003 can be aligned with the hook lock parts of the agricultural equipment.
[0063] In this embodiment, the control system can extract the features of the image according to the collected image information, and then compare the extracted feature...
Embodiment 3
[0065] This embodiment provides an unmanned agricultural robot driven in parallel by flexible cables, which adds an alarm system and a detection system on the basis of Embodiment 1. Wherein, the detection system includes a ranging sensor. The ranging sensor is installed on the workbench 2004 and is used to detect the real-time distance between the agricultural equipment and the workbench 2004 when the workbench 2004 is located above the agricultural equipment. The control system is also used to judge whether the real-time distance is less than a preset distance. When the real-time distance is less than the preset distance, the control system drives the alarm system to send out an alarm message. In this way, when the distance between the workbench and the agricultural equipment is too small, the alarm system will send out an alarm message, so that the hoisting process can be stopped in time, preventing the mobile platform from smashing the agricultural equipment or the agricul...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More