

Gmapping mapping method of mobile robot based on sparse pose adjustment
A mobile robot and posture adjustment technology, applied in the field of robotics, can solve problems such as complex environments and noise interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
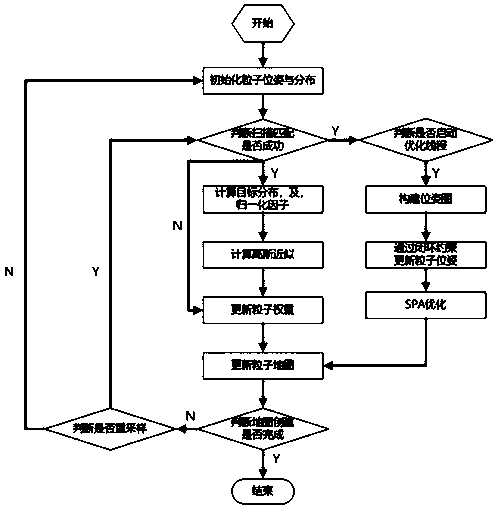
[0060] This embodiment provides a Gmapping mapping method for mobile robots based on sparse pose adjustment, such as figure 1 As shown, the steps include:
[0061] S1: Initialize the particle pose and distribution, and pass the robot pose of the i-th particle at the previous moment with odometer information Estimate the robot's estimated pose of the i-th particle at this moment , calculate the proposed distribution p;
[0062] S2: Based on map information , robot estimated pose , observation , matching the estimated pose of the robot scanning the i-th particle the surrounding area;
[0063] If the scan matching is successful, enter S3 to calculate the maximum likelihood estimation value of the robot pose ; And judge whether to start the linear optimization thread, if start the linear optimization process, then execute S3 and S3'; otherwise, only execute S3;
[0064] If the scan matching fails, skip S3 and S4 and calculate the pose of the robot , update the w...
Embodiment 2
[0109] On the basis of Embodiment 1, this embodiment further provides a Gmapping method for mobile robots based on sparse pose adjustment, such as figure 2 - as shown in Figure 6(b).
[0110] Currently, all lidar 2D SLAM algorithms rely on probabilistic models in the map construction process, which is essentially a state estimation problem for mobile robots. The advantage of applying a probability model is that it can enhance the robustness of the system to observation noise and the ability of the system to formally express its uncertainty in the process of measurement and estimation. The lidar 2DSLAM (2-dimensional planar simultaneous positioning and mapping method) based on the probability model mainly relies on Bayesian theorem to solve. Filter-based SLAM can be mainly divided into SLAM based on Kalman filter KF (Kalman filters) and SLAM method based on particle filter PF (Particle filters).
[0111]The KF filter is one of the successful implementations of the Bayesian f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More